Юный техник 1998-08, страница 63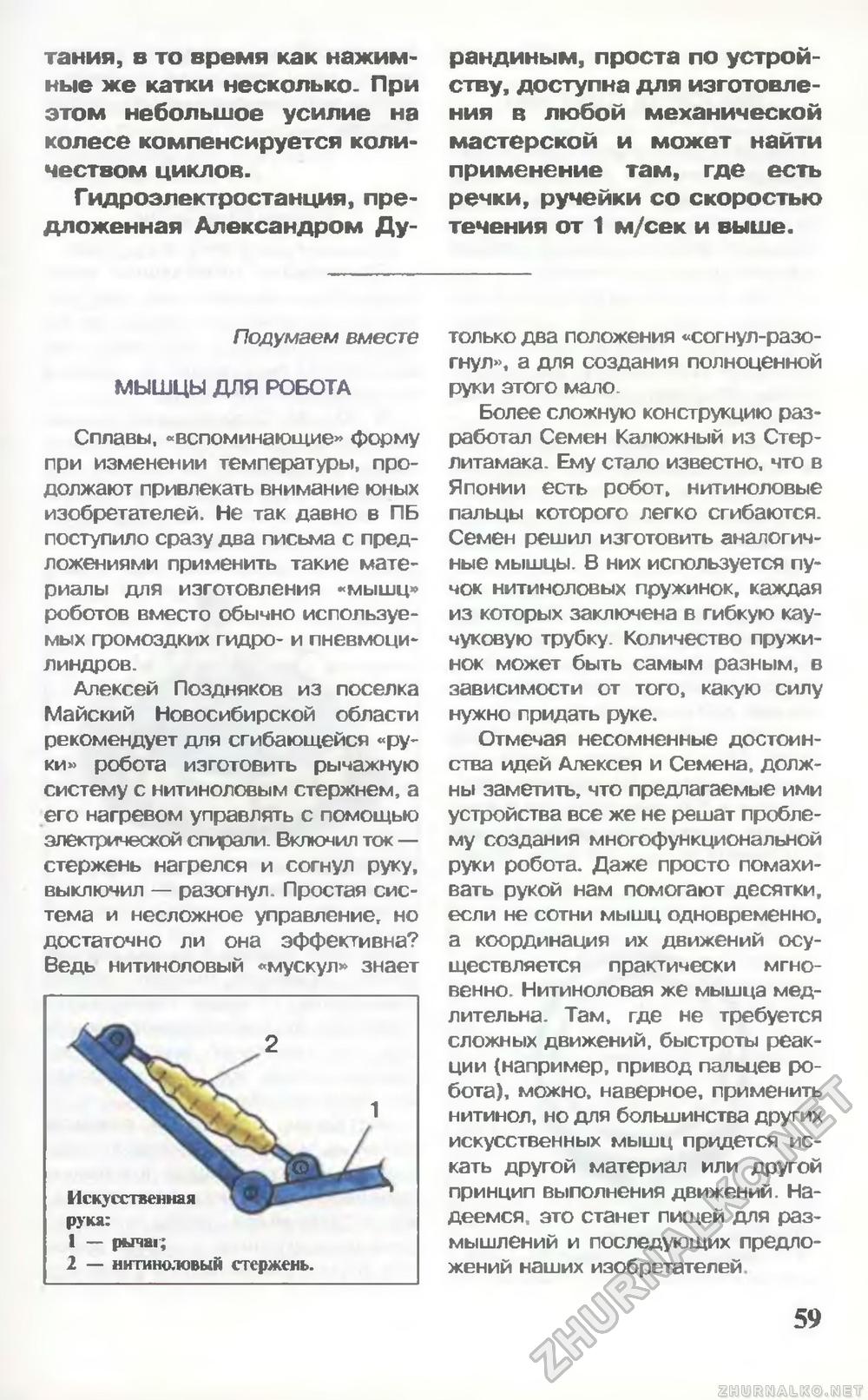
тания, в то время как нажимные же катки несколько. При этом небольшое усилие нп колесе компенсируется количеством циклов. Гидроэлектростанция, предложенная Александром Ду- рандиным, проста по устройству, достугна для изготовления в любой механической мастерской и может найти применение 1ам, где есть речки, ручейки со скоростью течения от 1 м/сек и выше. Подумаем вместе МЫШЦЫ ДЛЯ РОБОТА Сплавы, ^вспоминающие* фодму при изменении температуры, продолжают привлекать внимание Ю1 (ых изобретателей. Не так давно в Г!В поступило сразу дра письма с предложениями лримеьить такие материалы для изготовления «мышц* роботов вместо обычно используемых громоздких г идро- и пневмо1 1и~ линдров Алексей Поздняков из поселка Майский Новосибирской области рекомендует для сгибающейсп «руки» эсюста изготоеить рычажную систему с ьитиноловым стержнем а его нагревом управлять с гомощью ЭЛвкт] )ичесЖОЙ спирали. Включил ток — стержень нагрелся и согнул руку, выключил — разол |ул Простая система и несложное управление, но достаточно ли она эффективна' Вёдь нмтинолобый «мускул» знает только два положения «согнул-разо-гнул», а для создания полноценной суки этого мало Более сложную конструкцию разработал Семен Калюжный из Стер-лнтамака Ему стало известии, что в Японии есть робот, ннтиноловые пальцы которого легко сгибаются Семен решил изготовить аналогичное мышцы В них используется пучок нлт^нолоиых г оужинок, каждая из которых заключена в гибкую каучуковую трубку Количество пружинок можег быть самым разным, в зависимости от того, какую силу нужно придать руке. Отмечая несомненные достоинства идей Алексея и Семена должны заметить, что предлагаемые ими устр< »йства все же не решат проблему создания многофункциональной руки робота. Даже просто помахивать рукой нам помогают десятки если не сотни мышц одновременно, а координация их движений осуществляется практически мгновенно. Нитиноловая же мышца медлительна Там, где не требуется сложных движений, быстроты реакции {например, привод пальцев робота), можно, назерное, применить нптинол. но pj |я большинства дру1 их искусственных мышц придется искать другой материал или другой принцип выполнения движений Надеемся это станет пищей для размышлений и последующих предложений наших изобретателей Искусственная рука: 1 — рычаг; 2 — на гиноловь:й стержень. 59 |








