Юный техник 2007-03, страница 23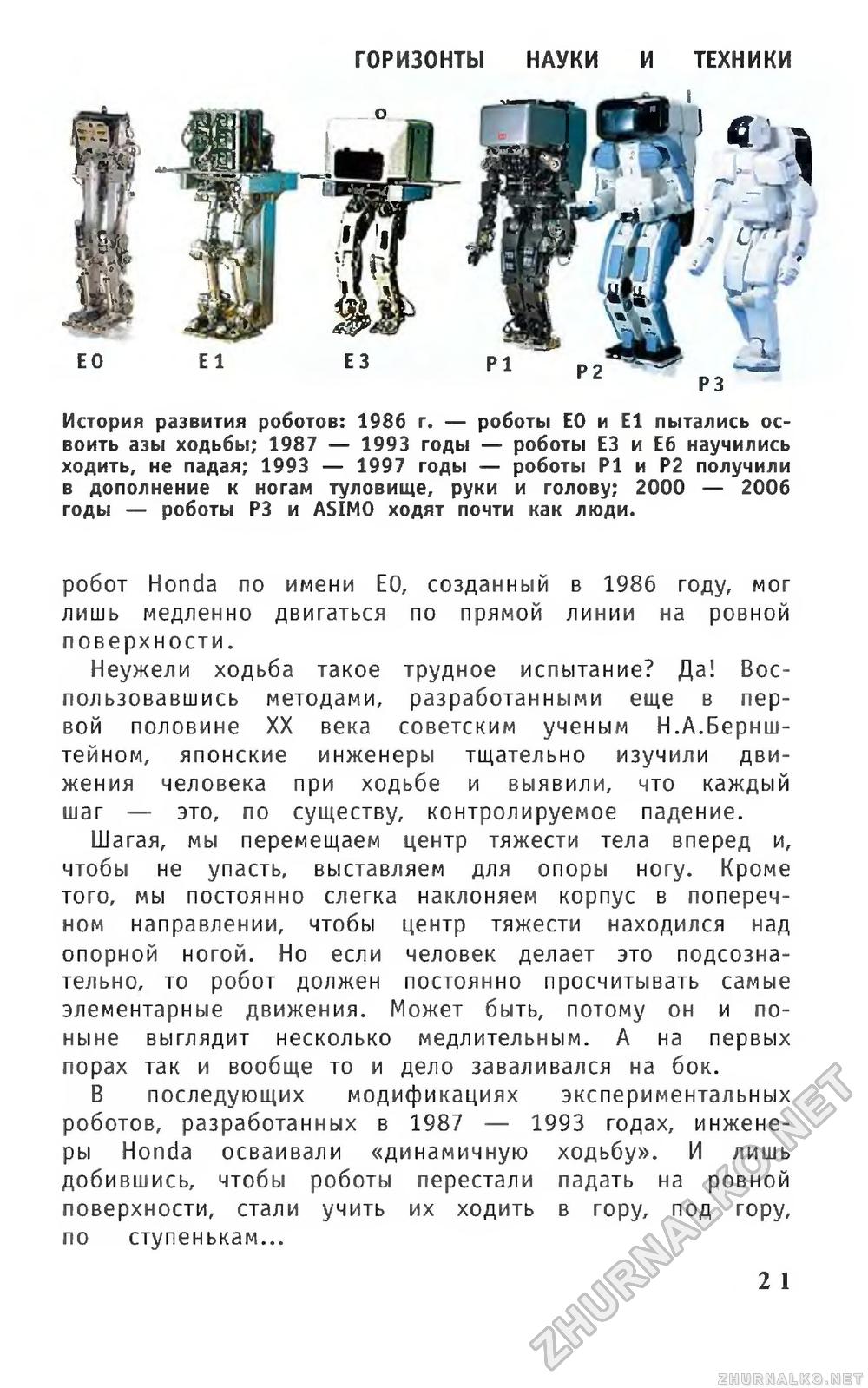
ГОРИЗОНТЫ НАУКИ И ТЕХНИКИ История развития роботов: 1986 г. — роботы ЕО и Е1 пытались освоить азы ходьбы; 1987 — 1993 годы — роботы ЕЗ и Е6 научились ходить, не падая; 1993 — 1997 годы — роботы Р1 и Р2 получили в дополнение к ногам туловище, руки и голову; 2000 — 2006 годы — роботы РЗ и ASIMO ходят почти как люди. робот Honda по имени ЕО, созданный в 1986 году, мог лишь медленно двигаться по прямой линии на ровной поверхности. Неужели ходьба такое трудное испытание? Да! Воспользовавшись методами, разработанными еще в первой половине XX века советским ученым Н.А.Бернш-тейном, японские инженеры тщательно изучили движения человека при ходьбе и выявили, что каждый шаг — это, по существу, контролируемое падение. Шагая, мы перемещаем центр тяжести тела вперед и, чтобы не упасть, выставляем для опоры ногу. Кроме того, мы постоянно слегка наклоняем корпус в поперечном направлении, чтобы центр тяжести находился над опорной ногой. Но если человек делает это подсознательно, то робот должен постоянно просчитывать самые элементарные движения. Может быть, потому он и поныне выглядит несколько медлительным. А на первых порах так и вообще то и дело заваливался на бок. В последующих модификациях экспериментальных роботов, разработанных в 1987 — 1993 годах, инженеры Honda осваивали «динамичную ходьбу». И лишь добившись, чтобы роботы перестали падать на ровной поверхности, стали учить их ходить в гору, под гору, по ступенькам... 1 1 |








