Техника - молодёжи 1998-08, страница 9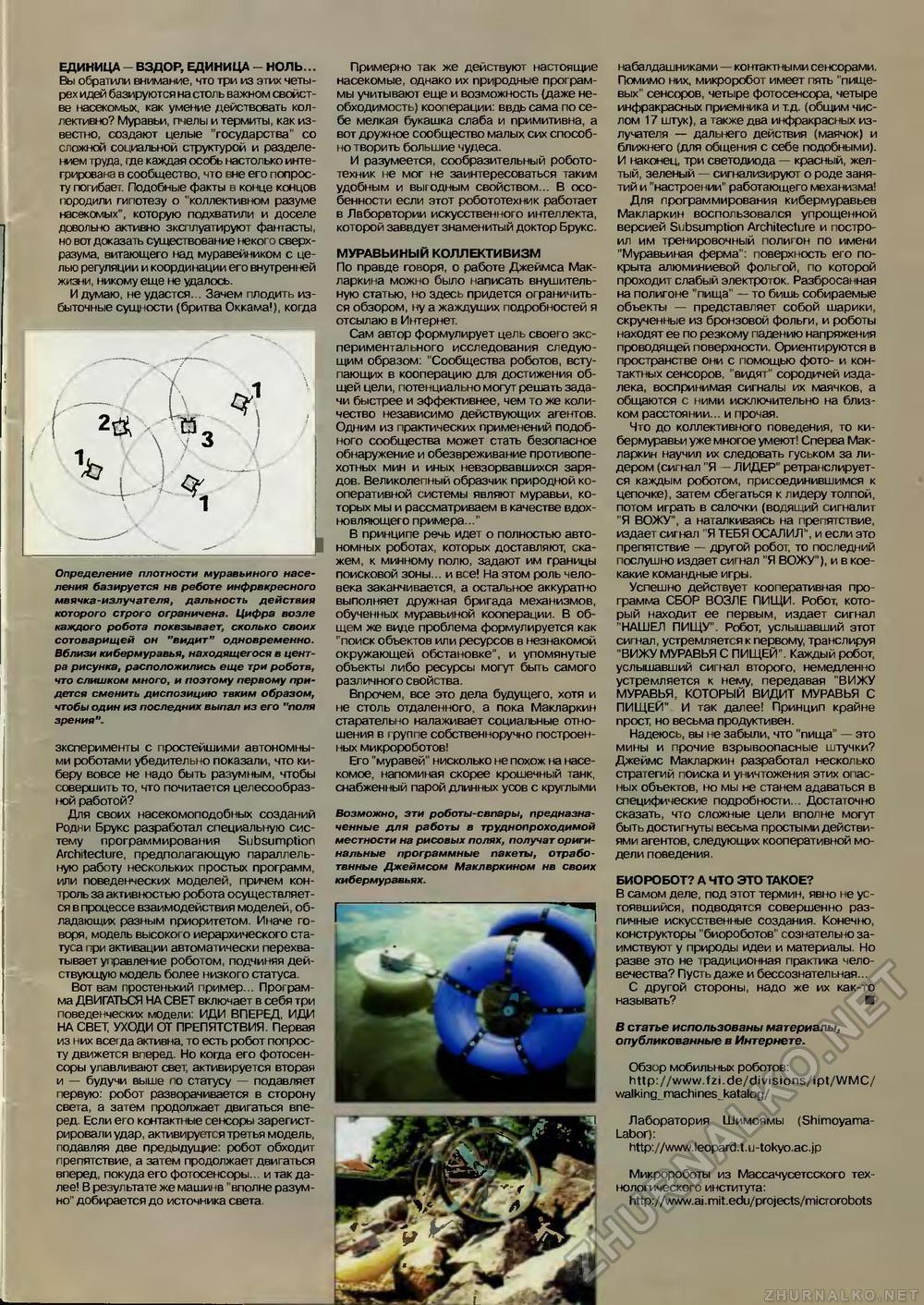
ЕДИНИЦА - ВЗДОР, ЕДИНИЦА - НОЛЬ... Вы обратили внимание, что три из этих четырех идей базируются на столь важном свойстве насекомых, как умение действовать коллективно? Муравьи, пчелы и термиты, как известно, создают целые "государства" со сложной социальной структурой и разделением труда, где каждая особь настолько интегрирована в сообщество, что вне его попросту погибает. Подобные факты в конце концов породили гипотезу о "коллективном разуме насекомых", которую подхватили и доселе довольно активно эксплуатируют фантасты, но вот доказать существование некого сверхразума, витающего над муравейником с целью регуляции и координации его внутренней жизни, никому еще не удалось. И думаю, не удастся... Зачем плодить избыточные сущности (бритва Оккама!), когда Определение плотности муравьиного населения базируется нв реботе инфрвкресного мвячка- излучателя, дальность действия которого строго ограничена. Цифра возле каждого робота поквзывает, сколько своих сотоварищей он "видит" одновременно. Вблизи кибермуравья, находящегося в центра рисунка, расположились еще три роботе, что слишком много, и поэтому первому придется сменить диспозицию таким образом, чтобы один из последних выпал из его "поля зрения". эксперименты с простейшими автономными роботами убедительно показали, что ки-беру вовсе не надо быть разумным, чтобы совершить то, что почитается целесообразной работой? Для своих насекомоподобных созданий Родни Брукс разработал специальную систему программирования Subsumption Architecture, предполагающую параллельную работу нескольких простых программ, или поведенческих моделей, причем контроль за активностью робота осуществляется в процессе взаимодействия моделей, обладающих разным приоритетом. Иначе говоря, модель высокого иерархического статуса при активации автоматически перехватывает управление роботом, подчиняя действующую модель более низкого статуса. Вот вам простенький пример... Программа ДВИГАТЬСЯ НА СВЕТ включает в себя три поведенческих модели: ИДИ ВПЕРЕД, ИДИ НА СВЕТ, УХОДИ ОТ ПРЕПЯТСТВИЯ. Первая из них всегда активна, то есть робот попросту движется вперед. Но когда его фотосенсоры улавливают свет, активируется вторая и — будучи выше по статусу — подавляет первую: робот разворачивается в сторону света, а затем продолжает двигаться вперед. Если его контактные сенсоры зарегистрировали удар, активируется третья модель, подавляя две предыдущие: робот обходит препятствие, а затем продолжает двигаться вперед, покуда его фотосенсоры... и так далее! В результате же машинв "вполне разумно" добирается до источника света. Примерно так же действуют настоящие насекомые, однако их природные программы учитывают еще и возможность {даже необходимость) кооперации: ввдь сама по себе мелкая букашка слаба и примитивна, а вот дружное сообщество малых сих способно творить большие чудеса. И разумеется, сообразительный робототехник не мог не заинтересоваться таким удобным и выгодным свойством... В особенности если этот робототехник работает в Лвборвтории искусственного интеллекта, которой заввдует знаменитый доктор Брукс. МУРАВЬИНЫЙ КОЛЛЕКТИВИЗМ По правде говоря, о работе Джеймса Мак-ларкина можно было написать внушительную статью, но здесь придется ограничиться обзором, ну а жаждущих подробностей я отсылаю в Интернет. Сам автор формулирует цель своего экспериментального исследования следующим образом: "Сообщества роботов, вступающих в кооперацию для достижения общей цели, потенциально могут решать задачи быстрее и эффективнее, чем то же количество независимо действующих агентов. Одним из практических применений подобного сообщества может стать безопасное обнаружение и обезвреживание противопехотных мин и иных невзорвавшихся зарядов. Великолепный образчик природной кооперативной системы являют муравьи, которых мы и рассматриваем в качестве вдохновляющего примера..." В принципе речь идет о полностью автономных роботах, которых доставляют, скажем, к минному полю, задают им границы поисковой зоны... и все! На этом роль человека заканчивается, а остальное аккуратно выполняет дружная бригада механизмов, обученных муравьиной кооперации. В общем же виде проблема формулируется как "поиск объектов или ресурсов в незнакомой окружающей обстановке", и упомянутые объекты либо ресурсы могут быть самого различного свойства. Впрочем, все это дела будущего, хотя и не столь отдаленного, а пока Макларкин старательно налаживает социальные отношения в группе собственноручно построенных микророботов! Его "муравей" нисколько не похож на насекомое, напоминая скорее крошечный танк, снабженный парой длинных усов с круглыми Возможно, эти роботы-свпары, предназначенные для работы в труднопроходимой местности на рисовых полях, получат оригинальные программные пакеты, отрабо-твнные Джеймсом Маклвркином нв своих кибермуравьях. набалдашниками — контактными сенсорами. Помимо них, микроробот имеет пять "пищевых" сенсоров, четыре фотосенсора, четыре инфракрасных приемника и т.д. (общим числом 17 штук), а также два инфракрасных излучателя — дальнего действия (маячок) и ближнего (для общения с себе подобными). И наконец, три светодиода — фасный, желтый, зеленый — сигнализируют о роде занятий и "настроении" работающего механизма! Для программирования кибермуравьев Макларкин воспользовался упрощенной версией Subsumption Architecture и построил им тренировочный полигон по имени "Муравьиная ферма": поверхность его покрыта алюминиевой фольгой, по которой проходит слабый электроток. Разбросанная на полигоне "пища" — то бишь собираемые объекты — представляет собой шарики, скрученные из бронзовой фольги, и роботы находят ее по резкому падению напряжения проводящей поверхности. Ориентируются в пространстве они с помощью фото- и контактных сенсоров, "видят" сородичей издалека, воспринимая сигналы их маячков, а общаются с ними исключительно на близком расстоянии... и прочая. Что до коллективного поведения, то ки-бермуравьи уже многое умеют! Сперва Макларкин научил их следовать гуськом за лидером (сигнал "Я — ЛИДЕР" ретранслируется каждым роботом, присоединившимся к цепочке), затем сбегаться к лидеру толпой, потом играть в салочки (водящий сигналит "Я ВОЖУ", а наталкиваясь на препятствие, издает сигнал "Я ТЕБЯ ОСАЛИЛ", и если это препятствие — другой робот, то последний послушно издает сигнал "Я ВОЖУ"), и в кое-какие командные игры. Успешно действует кооперативная программа СБОР ВОЗЛЕ ПИЩИ. Робот, который находит ее первым, издает сигнал "НАШЕЛ ПИЩУ". Робот, услышавший этот сигнал, устремляется к первому, транслируя "ВИЖУ МУРАВЬЯ С ПИЩЕЙ". Каждый робот, услышавший сигнал второго, немедленно устремляется к нему, передавая "ВИЖУ МУРАВЬЯ КОТОРЫЙ ВИДИТ МУРАВЬЯ С ПИЩЕЙ" И так далее! Принцип крайне прост, но весьма продуктивен. Надеюсь, вы не забыли, что "пища" — это мины и прочие взрывоопасные штучки? Джеймс Макларкин разработал несколько стратегий поиска и уничтожения этих опасных объектов, но мы не станем адаваться в специфические подробности... Достаточно сказать, что сложные цели вполне могут быть достигнуты весьма простыми действиями агентов, следующих кооперативной модели поведения. БИОРОБОТ? А ЧТО ЭТО ТАКОЕ? В самом деле, под этот термин, явно не устоявшийся, подводятся совершенно различные искусственные создания. Конечно, конструкторы "биороботов" сознательно заимствуют у природы идеи и материалы. Но разве это не традиционная практика человечества? Пусть даже и бессознательная... С другой стороны, надо же их как-то называть? ■ В статье использованы материалы, опубликованные в Интернете. Обзор мобильных роботов: http://www.fzi.de/divisions/ipt/WMC/ walking, machines. katalog/ Лаборатория Шимоямы (Shimoyama-Labor): http://www. leopard. t. u -tokyo.ac.jp Микророботы из Массачусетсского технологического института: http://www.ai .mit.edu/projects/microrobots |








