Техника - молодёжи 2006-05, страница 38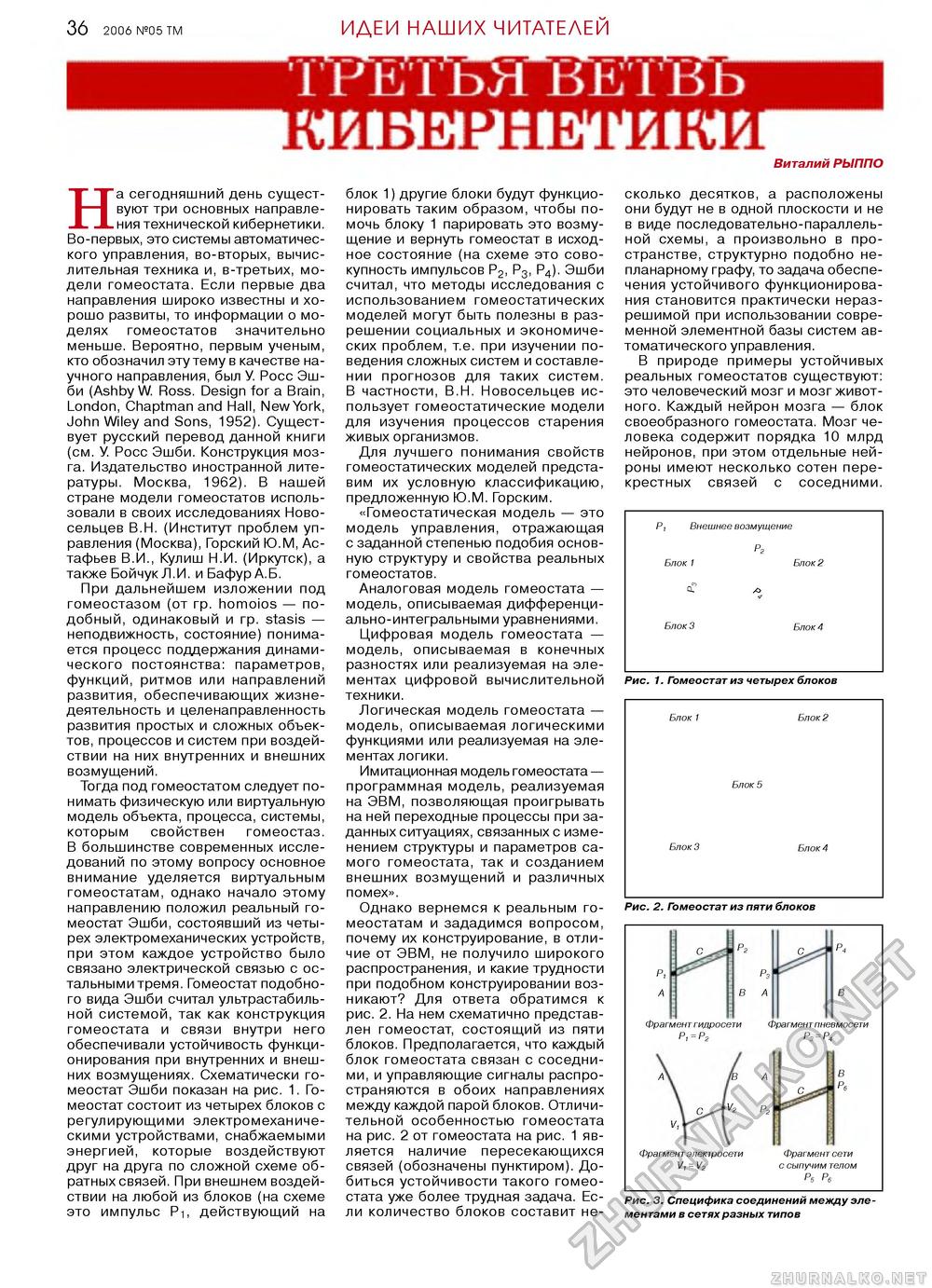
36 2006 №05 ТМ ИДЕИ НАШИХ ЧИТАТЕЛЕЙ ТРЕТЬЯ ВЕТВЬ КИБЕРНЕТИКИВиталий РЫППО На сегодняшний день существуют три основных направления технической кибернетики. Во-первых, это системы автоматического управления, во-вторых, вычислительная техника и, в-третьих, модели гомеостата. Если первые два направления широко известны и хорошо развиты, то информации о моделях гомеостатов значительно меньше. Вероятно, первым ученым, кто обозначил эту тему в качестве научного направления, был У. Росс Эш-би (Ashby W. Ross. Design for a Brain, London, Chaptman and Hall, New York, John Wiley and Sons, 1952). Существует русский перевод данной книги (см. У. Росс Эшби. Конструкция мозга. Издательство иностранной литературы. Москва, 1962). В нашей стране модели гомеостатов использовали в своих исследованиях Новосельцев В.Н. (Институт проблем управления (Москва), Горский Ю.М, Астафьев В.И., Кулиш Н.И. (Иркутск), а также БойчукЛ.И. и БафурА.Б. При дальнейшем изложении под гомеостазом (от гр. homoios — подобный, одинаковый и гр. stasis — неподвижность, состояние) понимается процесс поддержания динамического постоянства: параметров, функций, ритмов или направлений развития, обеспечивающих жизнедеятельность и целенаправленность развития простых и сложных объектов, процессов и систем при воздействии на них внутренних и внешних возмущений. Тогда под гомеостатом следует понимать физическую или виртуальную модель объекта, процесса, системы, которым свойствен гомеостаз. В большинстве современных исследований по этому вопросу основное внимание уделяется виртуальным гомеостатам, однако начало этому направлению положил реальный го-меостат Эшби, состоявший из четырех электромеханических устройств, при этом каждое устройство было связано электрической связью с остальными тремя. Гомеостат подобного вида Эшби считал ультрастабильной системой, так как конструкция гомеостата и связи внутри него обеспечивали устойчивость функционирования при внутренних и внешних возмущениях. Схематически гомеостат Эшби показан на рис. 1. Гомеостат состоит из четырех блоков с регулирующими электромеханическими устройствами, снабжаемыми энергией, которые воздействуют друг на друга по сложной схеме обратных связей. При внешнем воздействии на любой из блоков (на схеме это импульс Р1, действующий на блок 1) другие блоки будут функционировать таким образом, чтобы помочь блоку 1 парировать это возмущение и вернуть гомеостат в исходное состояние (на схеме это совокупность импульсов Р2, Р3, Р4). Эшби считал, что методы исследования с использованием гомеостатических моделей могут быть полезны в разрешении социальных и экономических проблем, т.е. при изучении поведения сложных систем и составлении прогнозов для таких систем. В частности, В.Н. Новосельцев использует гомеостатические модели для изучения процессов старения живых организмов. Для лучшего понимания свойств гомеостатических моделей представим их условную классификацию, предложенную Ю.М. Горским. «Гомеостатическая модель — это модель управления, отражающая с заданной степенью подобия основную структуру и свойства реальных гомеостатов. Аналоговая модель гомеостата — модель, описываемая дифференци-ально-интеграпьными уравнениями. Цифровая модель гомеостата — модель, описываемая в конечных разностях или реализуемая на элементах цифровой вычислительной техники. Логическая модель гомеостата — модель, описываемая логическими функциями или реализуемая на элементах логики. Имитационная модель гомеостата — программная модель, реализуемая на ЭВМ, позволяющая проигрывать на ней переходные процессы при заданных ситуациях, связанных с изменением структуры и параметров самого гомеостата, так и созданием внешних возмущений и различных помех». Однако вернемся к реальным гомеостатам и зададимся вопросом, почему их конструирование, в отличие от ЭВМ, не получило широкого распространения, и какие трудности при подобном конструировании возникают? Для ответа обратимся к рис. 2. На нем схематично представлен гомеостат, состоящий из пяти блоков. Предполагается, что каждый блок гомеостата связан с соседними, и управляющие сигналы распространяются в обоих направлениях между каждой парой блоков. Отличительной особенностью гомеостата на рис. 2 от гомеостата на рис. 1 является наличие пересекающихся связей (обозначены пунктиром). Добиться устойчивости такого гомеостата уже более трудная задача. Если количество блоков составит не сколько десятков, а расположены они будут не в одной плоскости и не в виде последовательно-параллель-ной схемы, а произвольно в пространстве, структурно подобно не-планарному графу, то задача обеспечения устойчивого функционирования становится практически неразрешимой при использовании современной элементной базы систем автоматического управления. В природе примеры устойчивых реальных гомеостатов существуют: это человеческий мозг и мозг животного. Каждый нейрон мозга — блок своеобразного гомеостата. Мозг человека содержит порядка 10 млрд нейронов, при этом отдельные нейроны имеют несколько сотен перекрестных связей с соседними.
Рис. 1. Гомеостат из четырех блоков Рис. 1. Гомеостат из четырех блоков
Рис. 2. Гомеостат из пяти блоков Рис. 2. Гомеостат из пяти блоков Фрагмент гидросети Фрагмент пневмосети Pi=P? Ря = Р4 Фрагмент электросети Vi = V2 Фрагмент сети с сыпучим телом Р5 Ре Рис. 3. Специфика соединении между элементами в сетях разных типов |
|||||||||||||||||||||








