Юный техник 1957-08, страница 55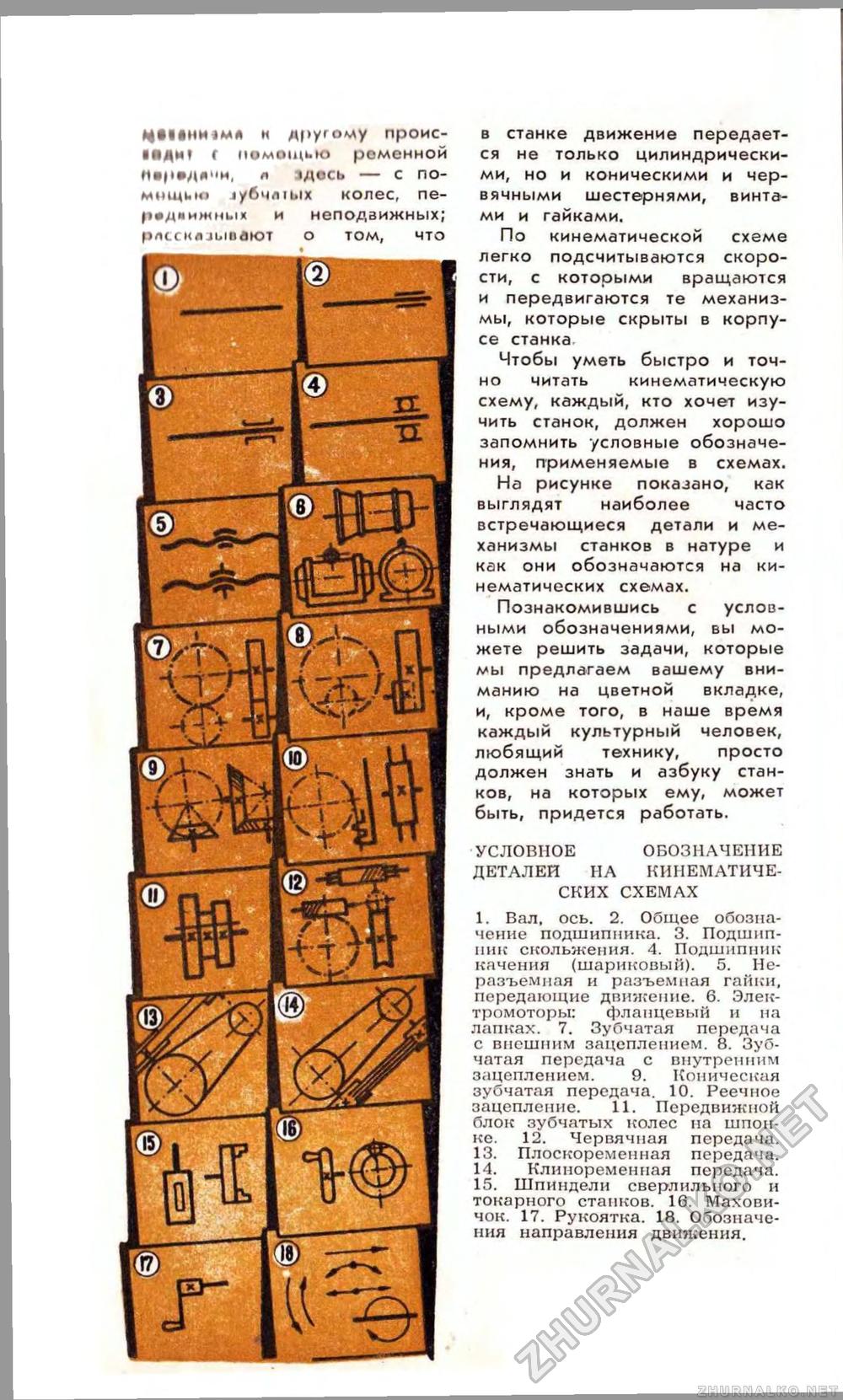
Ц§«»НМ1М« н другому проис-• нди| ( помощью ременной л здесь — с по-мнщып >убчл1ых колес, пе-раднижных и неподвижных; рлсскдзыоают о том, что в станке движение передается не только цилиндрическими, но и коническими и червячными шестернями, винтами и гайками. По кинематической схеме легко подсчитываются скорости, с которыми вращаются и передвигаются те механизмы, которые скрыты в корпусе станка Чтобы уметь быстро и точно читать кинематическую схему, каждый, кто хочет изучить станок, должен хорошо запомнить условные обозначения, применяемые в схемах. На рисунке показано, как выглядят наиболее часто встречающиеся детали и механизмы станков в натуре и как они обозначаются на кинематических схемах. Познакомившись с условными обозначениями, вы можете решить задачи, которые мы предлагаем вашему вниманию на цветной вкладке, и, кроме того, в наше время каждый культурный человек, любящий технику, просто должен знать и азбуку станков, на которых ему, может быть, придется работать. УСЛОВНОЕ ОБОЗНАЧЕНИЕ ДЕТАЛЕЙ НА КИНЕМАТИЧЕСКИХ СХЕМАХ 1. Вал, ось. 2. Общее обозначение подшипника. 3. Подшипник скольжения. 4. Подшипник качения (шариковый). 5. Неразъемная и разъемная гайки, передающие движение. 6. Электромоторы: фланцевый и на лапках. 7. Зубчатая передача с внешним зацеплением. 8. Зубчатая передача с внутренним зацеплением. 9. Коническая зубчатая передача. 10. Реечное зацепление. 11. Передвижной блок зубчатых колес на шпонке. 12. Червячная передача. 13. Плоскоременная передача. 14. Клиноременная передача. 15. Шпиндели сверлильного и токарного станков. 16. Маховичок. 17. Рукоятка. 18. Обозначения направления движения. |








