Юный техник 2003-11, страница 77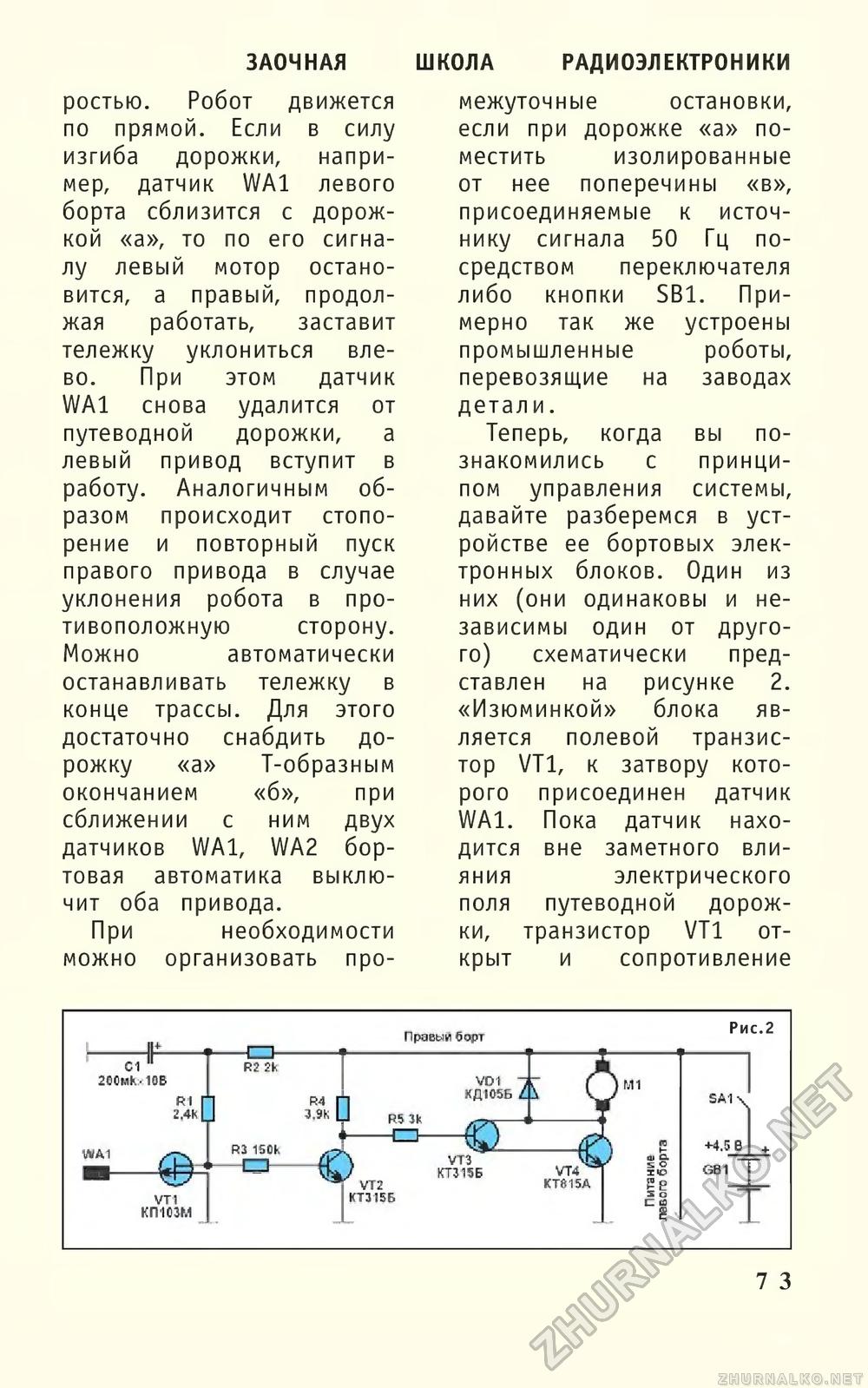
ЗАОЧНАЯ ШКОЛА РАДИОЭЛЕКТРОНИКИ ростью. Робот движется по прямой. Если в силу изгиба дорожки, например, датчик WA1 левого борта сблизится с дорожкой «а», то по его сигналу левый мотор остановится, а правый, продолжая работать, заставит тележку уклониться влево. При этом датчик WA1 снова удалится от путеводной дорожки, а левый привод вступит в работу. Аналогичным образом происходит стопо-рение и повторный пуск правого привода в случае укпонения робота в противоположную сторону. Можно автоматически останавливать тележку в конце трассы. Для этого достаточно снабдить дорожку «а» Т-образным окончанием «б», при сближении с ним двух датчиков WA1, WA2 бортовая автоматика выключит оба привода. При необходимости можно организовать про межуточные остановки, если при дорожке «а» поместить изолированные от нее поперечины «в», присоединяемые к источнику сигнала 50 Гц посредством переключателя либо кнопки SB1. Примерно так же устроены промышленные роботы, перевозящие на заводах детали. Теперь, когда вы познакомились с принципом управления системы, давайте разберемся в устройстве ее бортовых электронных блоков. Один из них (они одинаковы и независимы один от другого) схематически представлен на рисунке 2. «Изюминкой» блока является полевой транзистор VT1, к затвору которого присоединен датчик WA1. Пока датчик находится вне заметного влияния электрического поля путеводной дорожки, транзистор VT1 открыт и сопротивление г+ С1 " аесмкхюв VWA1 О R2 2к R1 П глкц VT1 КП1СЗМ РЗ ISCk 3LD Прзвь й бчрт VD1 КД105Б R5 Jk Ж VI2 KT3JS5 VT3 КТ315Б С) VT4 КТЙ15А Рис.2 5А1 \ +4.5 3 GB1 I 7 3 |








