Юный техник 1964-06, страница 31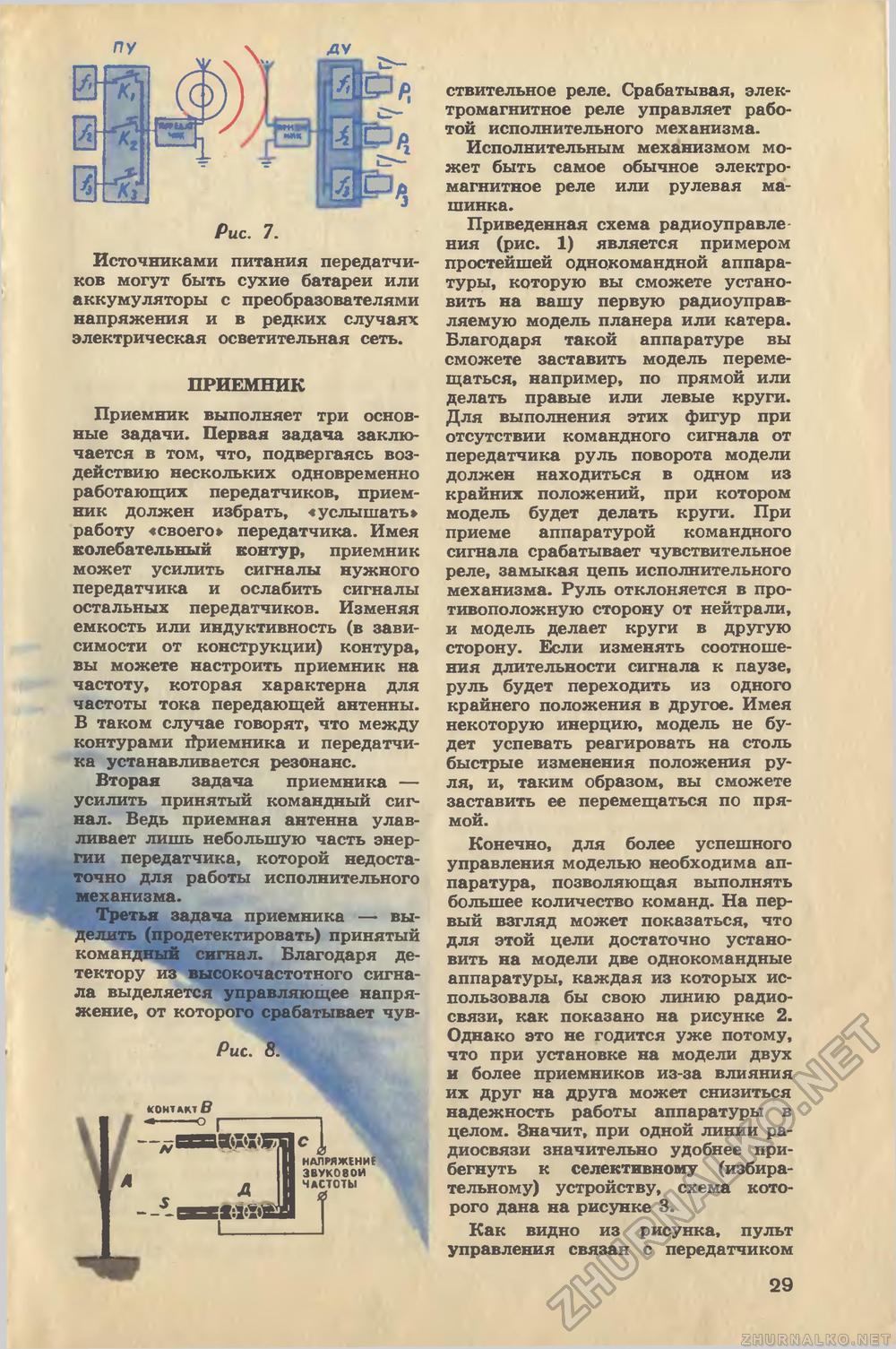
Рис. 7. Источниками питания передатчиков могут быть сухие батареи или аккумуляторы с преобразователями напряжения и в редких случаях электрическая осветительная сеть. ПРИЕМНИК Приемник выполняет три основные задачи. Первая задача заключается в том, что, подвергаясь воздействию нескольких одновременно работающих передатчиков, приемник должен избрать, «услышать» работу «своего» передатчика. Имея колебательный контур, приемник может усилить сигналы нужного передатчика и ослабить сигналы остальных передатчиков. Изменяя емкость или индуктивность (в зависимости от конструкции) контура, вы можете настроить приемник на частоту, которая характерна для частоты тока передающей антенны. В таком случае говорят, что между контурами Приемника и передатчика устанавливается резонанс. Вторая задача приемника — усилить принятый командный сигнал. Ведь приемная антенна улавливает лишь небольшую часть энергии передатчика, которой недостаточно для работы исполнительного механизма. Третья задача приемника — выделить (продетектировать) принятый командный сигнал. Благодаря детектору из высокочастотного сигнала выделяется управляющее напряжение, от которого срабатывает чув- Рис. 8. ствительное реле. Срабатывая, электромагнитное реле управляет работой исполнительного механизма. Исполнительным механизмом может быть самое обычное электромагнитное реле или рулевая машинка. Приведенная схема радиоуправления (рис. 1) является примером простейшей однокомандной аппаратуры, которую вы сможете установить на вашу первую радиоуправляемую модель планера или катера. Благодаря такой аппаратуре вы сможете заставить модель перемещаться, например, по прямой или делать правые или левые круги. Для выполнения этих фигур при отсутствии командного сигнала от передатчика руль поворота модели должен находиться в одном из крайних положений, при котором модель будет делать круги. При приеме аппаратурой командного сигнала срабатывает чувствительное реле, замыкая цепь исполнительного механизма. Руль отклоняется в противоположную сторону от нейтрали, и модель делает круги в другую сторону. Если изменять соотношения длительности сигнала к паузе, руль будет переходить из одного крайнего положения в другое. Имея некоторую инерцию, модель не будет успевать реагировать на столь быстрые изменения положения руля, и, таким образом, вы сможете заставить ее перемещаться по прямой. Конечно, для более успешного управления моделью необходима аппаратура, позволяющая выполнять большее количество команд. На первый взгляд может показаться, что для этой цели достаточно установить на модели две однокомандные аппаратуры, каждая из которых использовала бы свою линию радиосвязи, как показано на рисунке 2. Однако это не годится уже потому, что при установке на модели двух и более приемников из-за влияния их друг на друга может снизиться надежность работы аппаратуры в целом. Значит, при одной линии радиосвязи значительно удобнее прибегнуть к селективному (избирательному) устройству, схема которого дана на рисунке 3. Как видно из рисунка, пульт управления связан с передатчиком 29 |








