Техника - молодёжи 1962-03, страница 26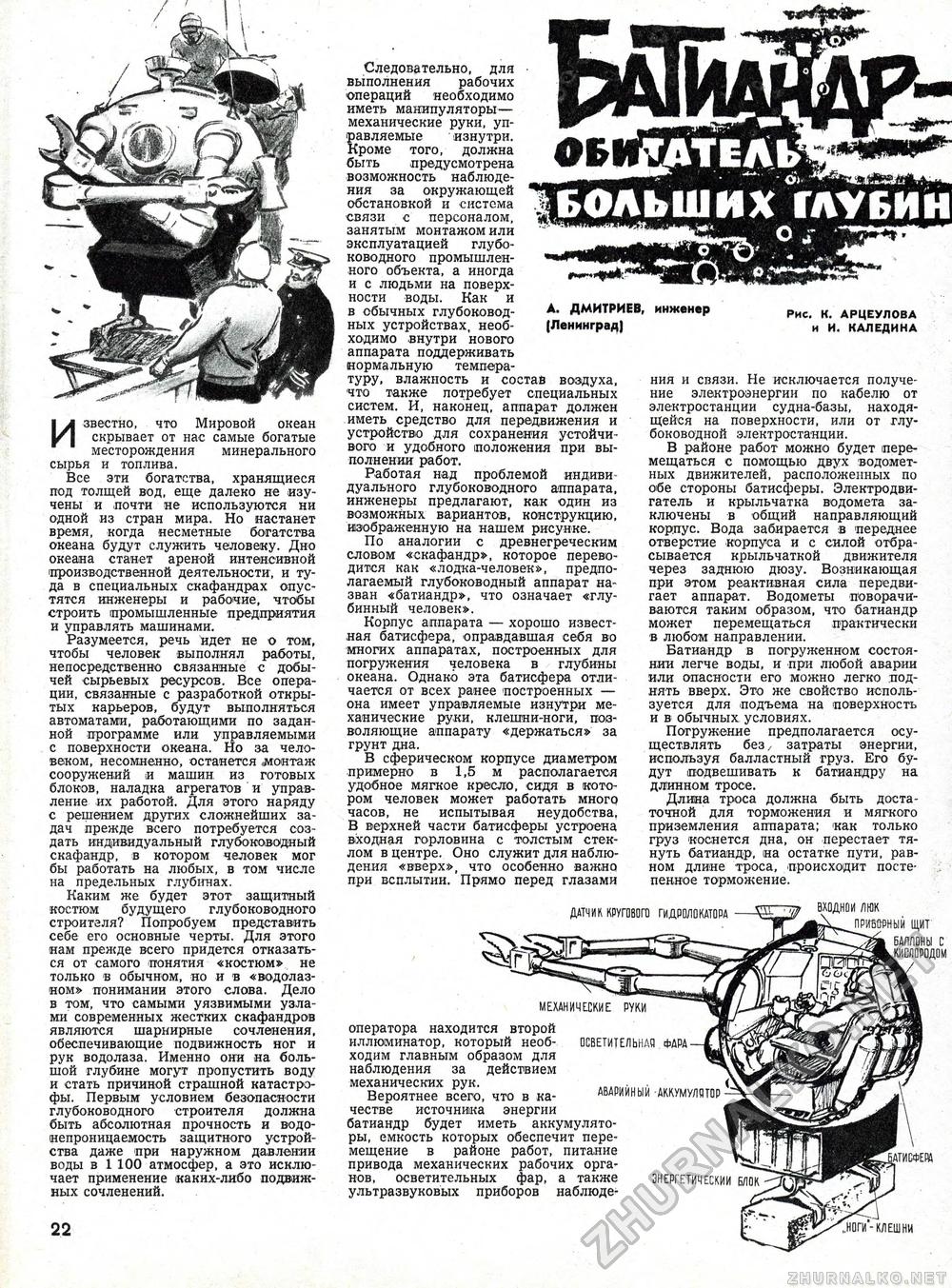
Известно, что Мировой океан скрывает от нас самые богатые месторождения минерального сырья и топлива. Все эти богатства, хранящиеся под толщей вод, еще далеко не изучены и почти не используются ни одной из стран мира. Но настанет время, когда несметные богатства океана будут служить человеку. Дно океана станет ареной интенсивной производственной деятельности, и туда в специальных скафандрах опустятся инженеры и рабочие, чтобы строить промышленные предприятия и управлять машинами. Разумеется, речь идет не о том, чтобы человек выполнял работы, непосредственно связанные с добычей сырьевых ресурсов. Все операции, связанные с разработкой открытых карьеров, будут выполняться автоматами, работающими по заданной программе или управляемыми с поверхности океана. Но за человеком, несомненно, останется .монтаж сооружений и машин из готовых блоков, наладка агрегатов и управление их работой. Для этого наряду с решением других сложнейших задач прежде всего потребуется создать индивидуальный глубоководный скафандр, в котором человек мог бы работать на любых, в том числе на предельных глубинах. Каким же будет этот защитный костюм будущего глубоководного строителя? Попробуем представить себе его основные черты. Для этого нам прежде всего придется отказаться от самого понятия «костюм» не только в обычном, но и в «водолазном» понимании этого слава. Дело в том, что самыми уязвимыми узлами современных жестких скафандров являются шарнирные сочленения, обеспечивающие подвижность ног и рук водолаза. Именно они на большой глубине могут пропустить воду и стать причиной страшной катастрофы. Первым условием безопасности глубоководного строителя должна быть абсолютная прочность и водонепроницаемость защитного устройства даже при наружном давлении воды в 1 100 атмосфер, а это исключает применение каких-либо подвижных сочленений. 22 А. ДМИТРИЕВ, (Ленинград) Следовательно, для выполнения рабочих операций необходимо иметь манипуляторы— механические руки, управляемые изнутри. Кроме того, должна быть предусмотрена возможность наблюдения за окружающей обстановкой и система связи с персоналом, занятым монтажом или эксплуатацией глубоководного промышленного объекта, а иногда и с людьми на поверхности воды. Как и в обычных глубоководных устройствах, необходимо внутри нового аппарата поддерживать нормальную температуру, влажность и состав воздуха, что также потребует специальных систем. И, наконец, аппарат должен иметь средство для передвижения и устройство для сохранения устойчивого и удобного положения при выполнении работ. Работая над проблемой индивидуального глубоководного аппарата, инженеры предлагают, как один из возможных вариантов, конструкцию, изображенную на нашем рисунке. По аналогии с древнегреческим словом «скафандр», которое переводится как «лодка-человек», предполагаемый глубоководный аппарат назван «батиандр», что означает «глубинный человек». Корпус аппарата — хорошо известная батисфера, оправдавшая себя во многих аппаратах, построенных для погружения человека в глубины океана. Однако эта батисфера отличается от всех ранее построенных — она имеет управляемые изнутри механические руки, клешни-ноги, позволяющие аппарату «держаться» за грунт дна. В сферическом корпусе диаметром примерно в 1,5 м располагается удобное мягкое кресло, сидя в котором человек может работать много часов, не испытывая неудобства, В верхней части батисферы устроена входная горловина с толстым стеклом в центре. Оно служит для наблюдения «вверх», что особенно важно при всплытии. Прямо перед глазами инженер Рис. К. АРЦЕУЛОВА и И. КАЛЕДИНА ния и связи. Не исключается получение электроэнергии по кабелю от электростанции судна-базы, находящейся на поверхности, или от глубоководной электростанции. В районе работ можно будет перемещаться с помощью двух водометных движителей, расположенных по обе стороны батисферы. Электродвигатель и крыльчатка водомета заключены в общий направляющий корпус. Вода забирается в переднее отверстие корпуса и с силой отбрасывается крыльчаткой движителя через заднюю дюзу. Возникающая при этом реактивная сила передвигает аппарат. Водометы поворачиваются таким образом, что батиандр может перемещаться практически в любом направлении. Батиандр в погруженном состоянии легче воды, и при любой аварии или опасности его можно легко поднять вверх. Это же свойство используется для подъема на поверхность и в обычных условиях. Погружение предполагается осуществлять без, затраты энергии, используя балластный груз. Его будут подвешивать к батиандру на длинном тросе. Длина троса должна быть достаточной для торможения и мягкого приземления аппарата; как только груз коснется дна, он перестает тянуть батиандр, на остатке пути, равном длине троса, происходит постепенное торможение. датчик кругового гидролокатора входной люк ПРИМРНЫЙ ЩИТ- БАЛЛОНЫ с КИСЛОРОДОМ оператора находится второй иллюминатор, который необходим главным образом для наблюдения за действием механических рук. Вероятнее всего, что в качестве источника энергии батиандр будет иметь аккумуляторы, емкость которых обеспечит перемещение в районе работ, питание привода механических рабочих органов, осветительных фар, а также ультразвуковых приборов наблюде- ЙТИОФЕРЙ ноги-клешни |








