Техника - молодёжи 1986-12, страница 8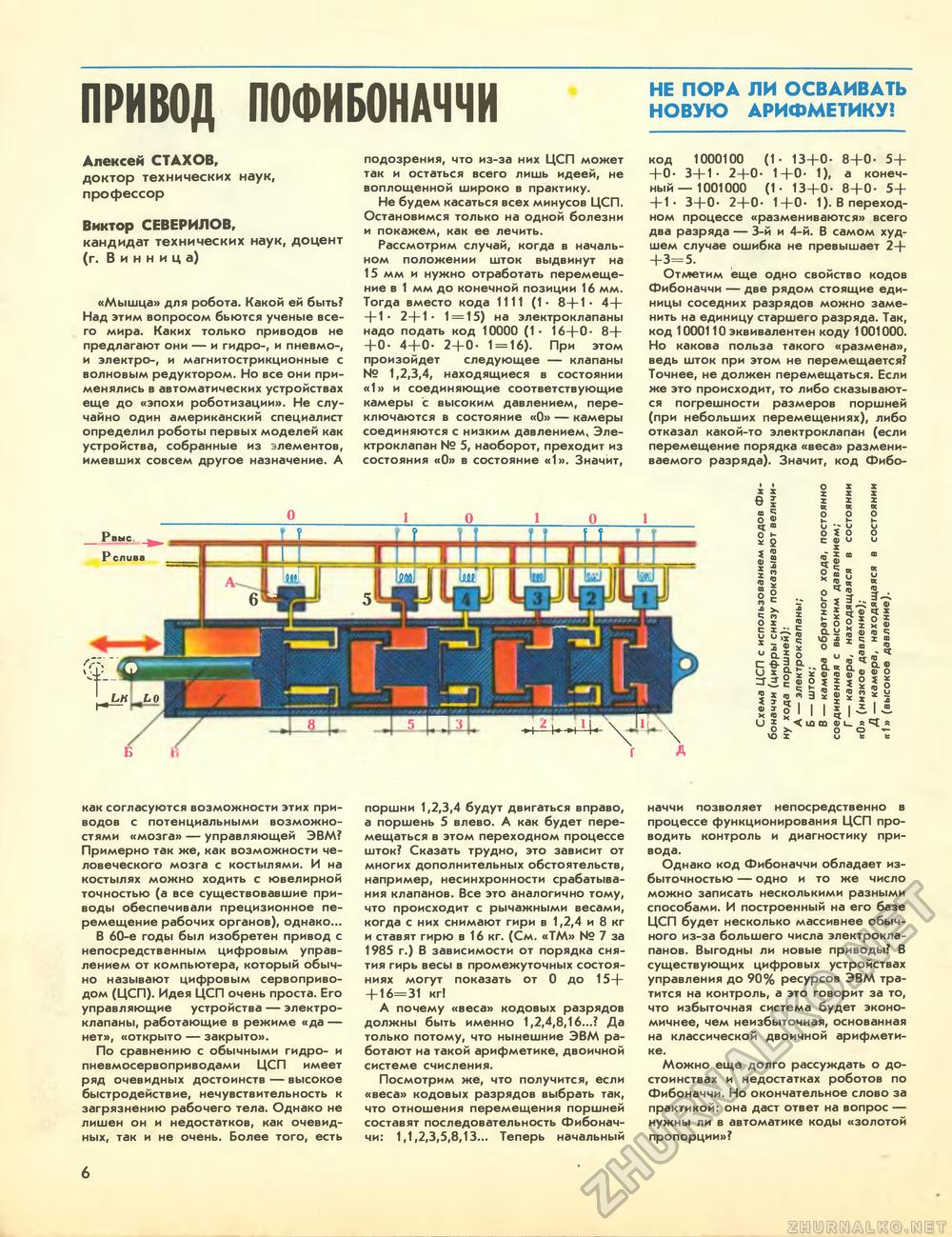
ПРИВОД ПОФИБОНАЧЧИ НЕ ПОРА ЛИ ОСВАИВАТЬ НОВУЮ АРИФМЕТИКУ! Алексей СТАХОВ,доктор технических наук, профессор Виктор СЕВЕРИЛОВ,кандидат технических наук, доцент (г. Винница) «Мышца» для робота. Какой ей быть? Над этим вопросом бьются ученые всего мира. Каких только приводов не предлагают они — и гидро-, и пневмо-, и электро-, и магнитострикционные с волновым редуктором. Но все они применялись в автоматических устройствах еще до «эпохи роботизации». Не случайно один американский специалист определил роботы первых моделей как устройства, собранные из элементов, имевших совсем другое назначение. А подозрения, что из-за них ЦСП может так и остаться всего лишь идеей, не воплощенной широко в практику. Не будем касаться всех минусов ЦСП. Остановимся только на одной болезни и покажем, как ее лечить. Рассмотрим случай, когда в начальном положении шток выдвинут на 15 мм и нужно отработать перемещение в 1 мм до конечной позиции 16 мм. Тогда вместо кода 1111 (1 • 8+1 • 4+ + 1 • 2+1- 1 = 15) на электроклапаны надо подать код 10000 (1- 16+0- 8+ +0. 4+0- 2+0- 1 = 16). При этом произойдет следующее — клапаны № 1,2,3,4, находящиеся в состоянии «1» и соединяющие соответствующие камеры с высоким давлением, переключаются в состояние «0» — камеры соединяются с низким давлением, Электроклапан № 5, наоборот, преходит из состояния «0» в состояние «1». Значит, код 1000100 (1. 13+0- 8+0- 5+ +0. 3+1- 2+0- 1+0- 1), а конечный—1001000 (1- 13+0- 8+0- 5+ + 1. 3+0. 2+0- 1+0. 1). В переходном процессе «размениваются» всего два разряда — 3-й и 4-й. В самом худшем случае ошибка не превышает 2+ +3=5. Отляетим еще одно свойство кодов Фибоначчи — две рядом стоящие единицы соседних разрядов можно заменить на единицу старшего разряда. Так, код 1000110 эквивалентен коду 1001000. Но какова польза такого «размена», ведь шток при этом не перемещается? Точнее, не должен перемещаться. Если же это происходит, то либо сказываются погрешности размеров поршней (при небольших перемещениях), либо отказал какой-то электроклапан (если перемещение порядка «веса» размениваемого разряда). Значит, код Фибо- • ' о х X £ 5 XXX в ? XXX ^ х В? в? в? ООО и V4 и о ого о с О) о и «О * « ® о 4 ВС * I s а ... а 9 I £ S ~ я х - = "а*о =ГЗ g « g 111 8 I О Щ11 iliiii o; <UJCQ «L О >4 о о — VO X о « « как согласуются возможности этих приводов с потенциальными возможностями «мозга» — управляющей ЭВМ? Примерно так же, как возможности человеческого мозга с костылями. И на костылях можно ходить с ювелирной точностью (а все существовавшие приводы обеспечивали прецизионное перемещение рабочих органов), однако... В 60-е годы был изобретен привод с непосредственным цифровым управлением от компьютера, который обычно называют цифровым сервоприводом (ЦСП). Идея ЦСП очень проста. Его управляющие устройства — электроклапаны, работающие в режиме «да — нет», «открыто — закрыто». По сравнению с обычными гидро- и пневмосервоприводами ЦСП имеет ряд очевидных достоинств — высокое быстродействие, нечувствительность к загрязнению рабочего тела. Однако не лишен он и недостатков, как очевидных, так и не очень. Более того, есть поршни 1,2,3,4 будут двигаться вправо, а поршень 5 влево. А как будет перемещаться в этом переходном процессе шток? Сказать трудно, это зависит от многих дополнительных обстоятельств, например, несинхронности срабатывания клапанов. Все это аналогично тому, что происходит с рычажными весами, когда с них снимают гири в 1,2,4 и 8 кг и ставят гирю в 16 кг. (См. «ТМ» № 7 за 1985 г.) В зависимости от порядка снятия гирь весы в промежуточных состояниях могут показать от 0 до 15+ + 16=31 кг! А почему «веса» кодовых разрядов должны быть именно 1,2,4,8,16...? Да только потому, что нынешние ЭВМ работают на такой арифметике, двоичной системе счисления. Посмотрим же, что получится, если «веса» кодовых разрядов выбрать так, что отношения перемещения поршней составят последовательность Фибоначчи: 1,1,2,3,5,8,13... Теперь начальный наччи позволяет непосредственно в процессе функционирования ЦСП проводить контроль и диагностику привода. Однако код Фибоначчи обладает избыточностью — одно и то же число можно записать несколькими разными способами. И построенный на его базе ЦСП будет несколько массивнее обычного из-за большего числа электроклапанов. Выгодны ли новые приводы? В существующих цифровых устройствах управления до 90% ресурсов ЭВМ тратится на контроль, а это говорит за то, что избыточная система будет экономичнее, чем неизбыточная, основанная на классической двоичной арифметике. Можно еще долго рассуждать о достоинствах и недостатках роботов по Фибоначчи. Но окончательное слово за практикой: она даст ответ на вопрос — нужны ли в автоматике коды «золотой пропорции»? 6 |








