Техника - молодёжи 1987-02, страница 46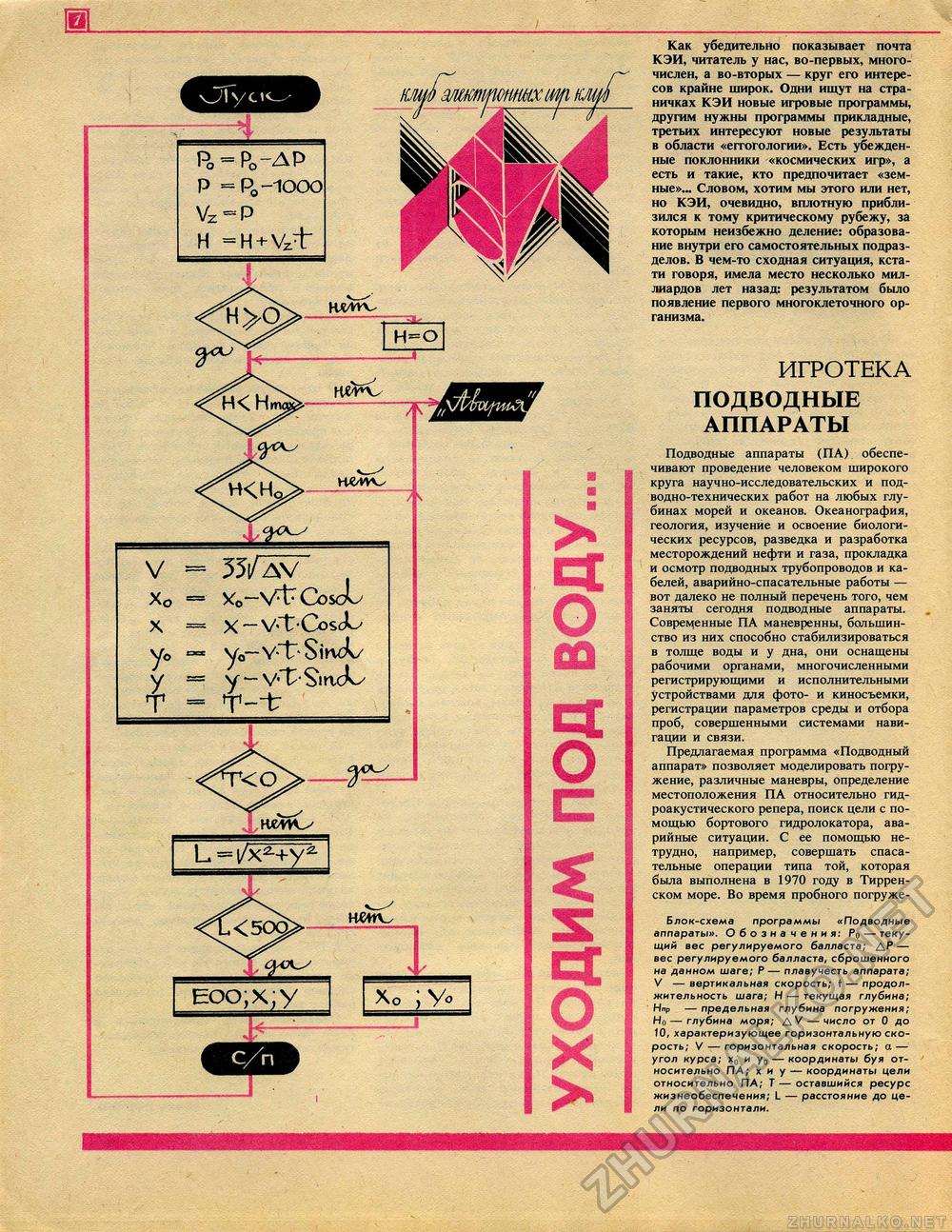
1 1
V Хо X ус I Т Х0-\/ФСо5сЬ X —V-~t-CoscL' yo-V-TSimL у-V-TSiac^ T--t
Еоо;х;у Хо ;уо шат Как убедительно показывает почта КЭИ, читатель у нас, во-первых, многочислен, а во-вторых — круг его интересов крайне широк. Одни ищут на страничках КЭИ новые игровые программы, другим нужны программы прикладные, третьих интересуют новые результаты в области «еггоГологии». Есть убежденные поклонники «космических игр», а есть и такие, кто предпочитает «земные»... Словом, хотим мы этого или нет, но КЭИ, очевидно, вплотную приблизился к тому критическому рубежу, за которым неизбежно деление: образование внутри его самостоятельных подразделов. В чем-то сходная ситуация, кстати говоря, имела место несколько миллиардов лет назад: результатом было появление первого многоклеточного организма. ИГРОТЕКА ПОДВОДНЫЕ АППАРАТЫ Подводные аппараты (ПА) обеспечивают проведение человеком широкого круга научно-исследовательских и под-водно-технических работ на любых глубинах морей и океанов. Океанография, геология, изучение и освоение биологических ресурсов, разведка и разработка месторождений нефти и газа, прокладка и осмотр подводных трубопроводов и кабелей, аварийно-спасательные работы — вот далеко не полный перечень того, чем заняты сегодня подводные аппараты. Современные ПА маневренны, большинство из них способно стабилизироваться в толще воды и у дна, они оснащены рабочими органами, многочисленными регистрирующими и исполнительными устройствами для фото- и киносъемки, регистрации параметров среды и отбора проб, совершенными системами навигации и связи. Предлагаемая программа «Подводный аппарат» позволяет моделировать погружение, различные маневры, определение местоположения ПА относительно гидроакустического репера, поиск цели с помощью бортового гидролокатора, аварийные ситуации. С ее помощью нетрудно, например, совершать спасательные операции типа той, которая была выполнена в 1970 году в Тирренском море. Во время пробного погруже- Блок-схема программы «Подводные аппараты». Обозначения: Ро — текущий вес регулируемого балласта; ДР — вес регулируемого балласта, сброшенного на данном шаге; Р— плавучесть аппарата; V — вертикальная скорость; t — продолжительность шага; Н — текущая глубина; Нпр — предельная глубина погружения; Но — глубина моря; Д V — число от 0 до 10, характеризующее горизонтальную скорость; V — горизонтальная скорость; a — угол курса; х0 и у0 — координаты буя относительно ПА; х и у —— координаты цели относительно ПА; Т—оставшийся ресурс жизнеобеспечения; L — расстояние до цели по горизонтали. |
||||||||||||||








