Техника - молодёжи 1987-02, страница 47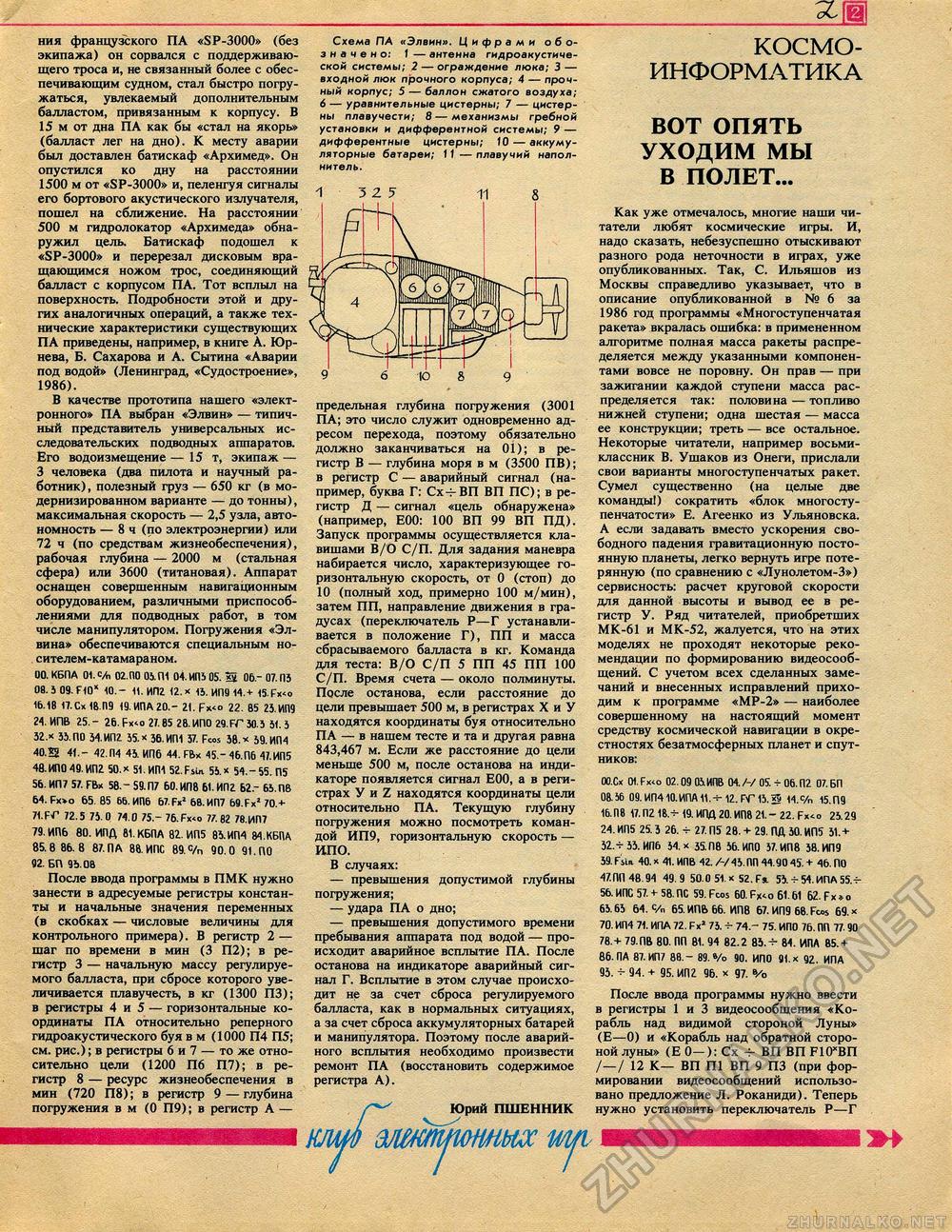
ния французского ПА «SP-ЗООО» (без экипажа) он сорвался с поддерживающего троса и, не связанный более с обеспечивающим судном, стал быстро погружаться, увлекаемый дополнительным балластом, привязанным к корпусу. В 15 м от дна ПА как бы «стал на якорь» (балласт лег на дно). К месту аварии был доставлен батискаф «Архимед». Он опустился ко дну на расстоянии 1500 м от «SP-ЗООО» и, пеленгуя сигналы его бортового акустического излучателя, пошел на сближение. На расстоянии 500 м гидролокатор «Архимеда» обнаружил цель. Батискаф подошел к «SP-ЗООО» и перерезал дисковым вращающимся ножом трос, соединяющий балласт с корпусом ПА. Тот всплыл на поверхность. Подробности этой и других аналогичных операций, а также технические характеристики существующих ПА приведены, например, в книге А. Юр-нева, Б. Сахарова и А. Сытина «Аварии под водой» (Ленинград, «Судостроение», 1986). В качестве прототипа нашего «электронного» ПА выбран «Элвин» — типичный представитель универсальных исследовательских подводных аппаратов. Его водоизмещение — 15 т, экипаж — 3 человека (два пилота и научный работник), полезный груз — 650 кг (в модернизированном варианте — до тонны), максимальная скорость — 2,5 узла, автономность — 8 ч (по электроэнергии) или 72 ч (по средствам жизнеобеспечения), рабочая глубина — 2000 м (стальная сфера) или 3600 (титановая). Аппарат оснащен совершенным навигационным оборудованием, различными приспособлениями для подводных работ, в том числе манипулятором. Погружения «Эл-вина» обеспечиваются специальным носителем-катамараном. U0. КБПА 01. % 02.П0 05.ГИ 04. H(li 05. Ш 06.- 07. П5 08.5 09.F10* 10.- 11.ИП2 12.Х 15. ИП9 14.+ <5. Fx', о 16.18 17. Сх 1В.П9 19. ИПА 20.- 21. Fx<o 22. 85 23.ИП9 24. ИПВ 25.- 26.Fx<o 27.85 28. ИПО 29.Fr 30.5 51. 5 32.x 33.ПО 34.ИП2 35.x 36.ИП1 37. Fcos 38.* 59.ИП4 40.S 41.- 42.(14 45. ИП6 44. FBx 45.- 46.П6 47.ИП5 48. ИПО 49. ИП2 50.x 51. ИПА 52.Fsi* 55.x 54.-55. П5 56.ИП7 57. FBx 58.- 59.П7 60.ИП8 61.ИП2 62.- 65. П8 64. Fx»o 65 85 66. ИП6 67. Fx2 68. ИП7 69. Fx* 70 .+ 71.F-T 72.5 75.0 74.0 75.- 76.Fx<o 77.82 78.ИП7 79.ИП6 80. ИПД 81. КБПА 82. ИП5 85.ИП4 84.КБПА 85.8 86.8 87. ПА 88. ИПС 89 <Уп 90.0 91. ПО 92. БГ\ 9Ь.08 После ввода программы в ПМК нужно занести в адресуемые регистры константы и начальные значения переменных (в скобках — числовые величины для контрольного примера). В регистр 2 — шаг по времени в мин (3 П2); в регистр 3 — начальную массу регулируемого балласта, при сбросе которого увеличивается плавучесть, в кг (1300 ПЗ); в регистры 4 и 5 — горизонтальные координаты ПА относительно реперного гидроакустического буя в м (1000 П4 П5; см. рис.); в регистры 6 и 7 — то же относительно цели (1200 П6 П.7); в регистр 8 — ресурс жизнеобеспечения в мин (720 П8); в регистр 9—глубина погружения в м (0 П9); в регистр А — Схема ПА «Элвин». Цифрами обозначено: 1 — антенна гидроакустической системы; 2 — ограждение люка; 3 — входной люк прочного корпуса; 4 — прочный корпус; 5 — баллон сжатого воздуха; 6 — уравнительные цистерны; 7 — цистерны плавучести; 8—механизмы гребной установки и дифферентной системы; 9 — дифферентные цистерны; 10 — аккумуляторные батареи; 11 —плавучий напол- предельная глубина погружения (3001 ПА; это число служит одновременно адресом перехода, поэтому обязательно должно заканчиваться на 01); в регистр В — глубина моря в м (3500 ПВ); в регистр С — аварийный сигнал (например, буква Г: Сх-^ВП ВП ПС); в регистр Д — сигнал «цель обнаружена» (например, Е00: 100 ВП 99 ВП ПД). Запуск программы осуществляется клавишами В/О С/П. Для задания маневра набирается число, характеризующее горизонтальную скорость, от 0 (стоп) до 10 (полный ход, примерно 100 м/мин), затем ПП, направление движения в градусах (переключатель Р—Г устанавливается в положение Г), ПП и масса сбрасываемого балласта в кг. Команда для теста: В/О С/П 5 ПП 45 ПП 100 С/П. Время счета — около полминуты. После останова, если расстояние до цели превышает 500 м, в регистрах X и У находятся координаты буя относительно ПА — в нашем тесте и та и другая равна 843,467 м. Если же расстояние до цели меньше 500 м, после останова на индикаторе появляется сигнал Е00, а в регистрах У и Z находятся координаты цели относительно ПА. Текущую глубину погружения можно посмотреть командой ИП9, горизонтальную скорость — ИПО. В случаях: — превышения допустимой глубины погружения; — удара ПА о дно; — превышения допустимого времени пребывания аппарата под водой — происходит аварийное всплытие ПА. После останова на индикаторе аварийный сигнал Г. Всплытие в этом случае происходит не за счет сброса регулируемого балласта, как в нормальных ситуациях, а за счет сброса аккумуляторных батарей и манипулятора. Поэтому после аварийного всплытия необходимо произвести ремонт ПА (восстановить содержимое регистра А). Юрий ПШЕННИК __ъш космо- ИНФОРМАТИКА вот опять УХОДИМ мы В ПОЛЕТ... Как уже отмечалось, многие наши читатели любят космические игры. И, надо сказать, небезуспешно отыскивают разного рода неточности в играх, уже опубликованных. Так, С. Ильяшов из Москвы справедливо указывает, что в описание опубликованной в № 6 за 1986 год программы «Многоступенчатая ракета» вкралась ошибка: в примененном алгоритме полная масса ракеты распределяется между указанными компонентами вовсе не поровну. Он прав — при зажигании каждой ступени масса распределяется так: половина — топливо нижней ступени; одна шестая — масса ее конструкции; треть — все остальное. Некоторые читатели, например восьмиклассник В. Ушаков из Онеги, прислали свои варианты многоступенчатых ракет. Сумел существенно (на целые две команды!) сократить «блок многоступенчатости» Е. Агеенко из Ульяновска. А если задавать вместо ускорения свободного падения гравитационную постоянную планеты, легко вернуть игре потерянную (по сравнению с «Лунолетом-3») сервисность: расчет круговой скорости для данной высоты и вывод ее в регистр У. Ряд читателей, приобретших МК-61 и МК-52, жалуется, что на этих моделях не проходят некоторые рекомендации по формированию видеосообщений. С учетом всех сделанных замечаний и внесенных исправлений приходим к программе «МР-2» — наиболее совершенному на настоящий момент средству космической навигации в окрестностях безатмосферных планет и спутников: ОО.Сх 01. Fx<o 02.09 05 ИПВ 04. /-/ 05. -г 06. П2 07. БП 08.36 09. ИП410.ИПА 11.-т-12. Ff 13. ху цс/п ц П9 16.П8 17. П2 18.19. ИПД 20. ИП8 21— 22. Fx*o 25.29 24. ИП5 25.3 26. 27. П5 28. + 29. ПД 30. ИП5 31.+ 32.+ 33. ИП6 34.x 35. Л8 56. ИПО 37.ИП8 38.ИП9 59.FsU 40.х 41. ИПВ 42. /-/45.ПП 44.9045. + 46. ПО 47.П11 48 94 49. 9 50.0 51. х 52. Fsu 53. -s- 54.ИПА 55. т-56. ИПС 57. + 58. ПО 59. Fcos 60. Fx<o 61.61 62. Fx »о 65.65 64. % 65. ИПВ 66. ИП8 67. ИП9 68. Fcos 69.x 70. ИП4 71. ИПА 72. Fx* 73. * 74,- 75. ИПО 76. ПП 77.90 78.+ 79.ПВ 80. ПП 81. 94 82.2 85.^ 84. ИПА 85.+ 86. ПА 87.ИП7 8В,- 89. »/о 90. ИПО 91.x 92. ИПА 95. 94. + 95. ИП2 96. х 97. <Уо После ввода программы нужно ввести в регистры 1 и 3 видеосообщения «Корабль над видимой стороной Луны» (Е—0) и «Корабль над обратной стороной луны» (Е 0—): Сх ВП ВП F10*Bn /—/ 12 К— ВП П1 ВП 9 ПЗ (при формировании видеосообщений использовано предложение Л. Роканиди). Теперь нужно установить переключатель Р—Г dMmjmmtm MJI |








