Техника - молодёжи 1989-05, страница 15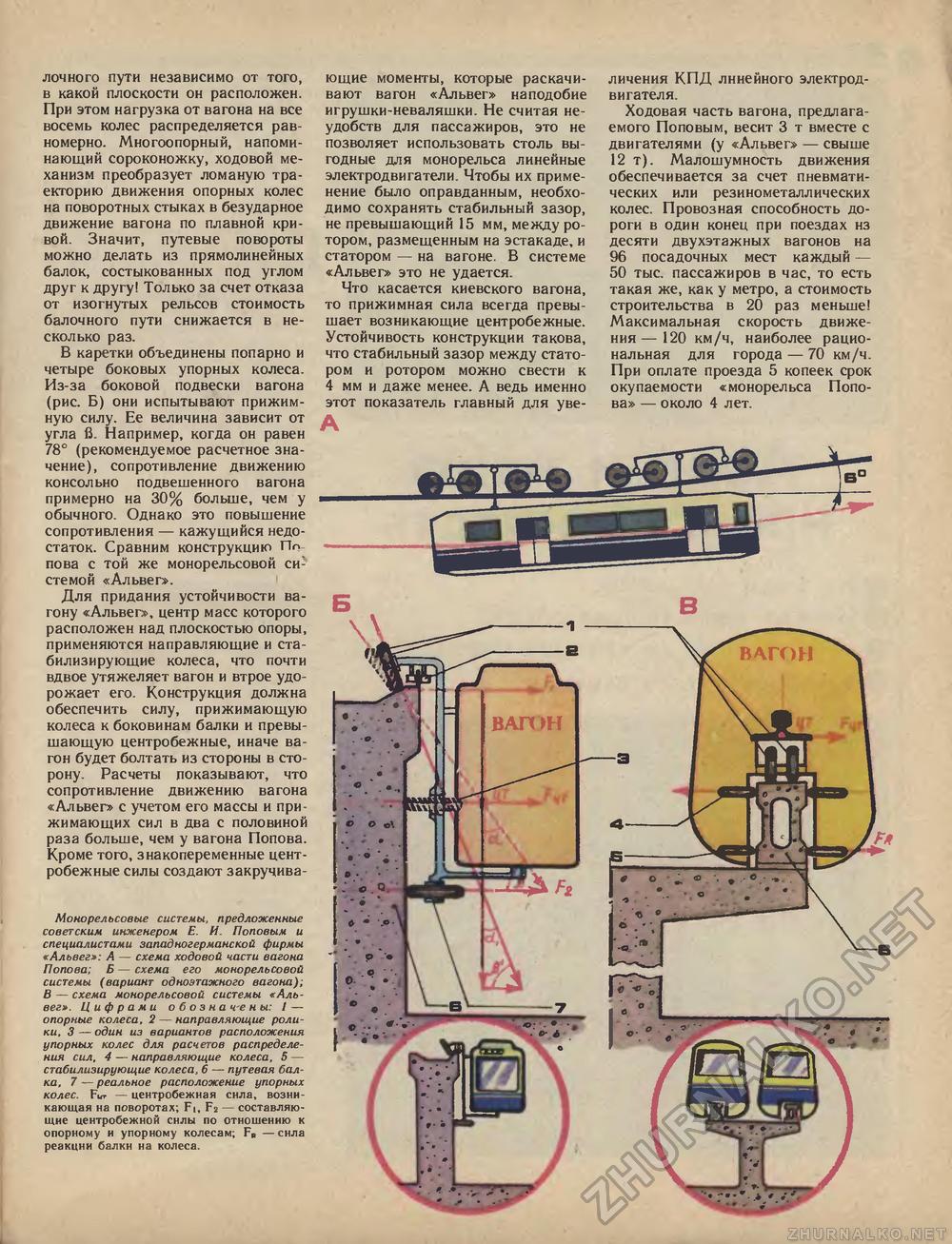
Монорельсовые системы, предложенные советским инженером Е. И. Поповым и специалистами западногерманской фирмы «гАльвег»: А — схема ходовой части вагона Попова; Б — схема его монорельсовой системы (вариант одноэтажного вагона); В — схема монорельсовой системы <гАль-вег». Цифрами о б о з на ч-е н ы: 1 — опорные колеса, 2 — направляющие ролики, 3 — один из вариантов расположения упорных колес для расчетов распределения сил, 4 — направляющие колеса, 5 — стабилизирующие колеса, 6 — путевая балка, 7 — реальное расположение упорных колес. Fw — центробежная снла, возникающая на поворотах; Fi, Fj — составляющие центробежной снлы по отношению к опорному и упорному колесам; F, —снла реакции балкн на колеса. ющие моменты, которые раскачивают вагон «Альвег» наподобие игрушки-неваляшки. Не считая неудобств для пассажиров, это не позволяет использовать столь выгодные для монорельса линейные электродвигатели. Чтобы их применение было оправданным, необходимо сохранять стабильный зазор, не превышающий 15 мм, между ротором, размещенным на эстакаде, и статором — на вагоне. В системе «Альвег» это не удается. Что касается киевского вагона, то прижимная сила всегда превышает возникающие центробежные. Устойчивость конструкции такова, что стабильный зазор между статором и ротором можно свести к 4 мм и даже менее. А ведь именно этот показатель главный для уве- А личения КПД лннеиного электродвигателя. Ходовая часть вагона, предлагаемого Поповым, весит 3 т вместе с двигателями (у «Альвег» — свыше 12 т). Малошумность движения обеспечивается за счет пневматических или резинометаллических колес. Провозная способность дороги в один конец при поездах нз десяти двухэтажных вагонов на 96 посадочных мест каждый — 50 тыс. пассажиров в час, то есть такая же, как у метро, а стоимость строительства в 20 раз меньше! Максимальная скорость движения— 120 км/ч, наиболее рациональная для города — 70 км/ч. При оплате проезда 5 копеек срок окупаемости «монорельса Попова» — около 4 лет. лочного пути независимо от того, в какой плоскости он расположен. При этом нагрузка от вагона на все восемь колес распределяется равномерно. Многоопорный, напоминающий сороконожку, ходовой механизм преобразует ломаную траекторию движения опорных колес на поворотных стыках в безударное движение вагона по плавной кривой. Значит, путевые повороты можно делать из прямолинейных балок, состыкованных под углом друг к другу! Только за счет отказа от изогнутых рельсов стоимость балочного пути снижается в несколько раз. В каретки объединены попарно и четыре боковых упорных колеса. Из-за боковой подвески вагона (рис. Б) они испытывают прижимную силу. Ее величина зависит от угла fi. Например, когда он равен 78° (рекомендуемое расчетное значение), сопротивление движению консольно подвешенного вагона примерно на 30% больше, чем у обычного. Однако это повышение сопротивления — кажущийся недостаток. Сравним конструкцию Попова с той же монорельсовой системой «Альвег». Для придания устойчивости вагону :Альвег», центр масс которого расположен над плоскостью опоры, применяются направляющие и стабилизирующие колеса, что почти вдвое утяжеляет вагон и втрое удорожает его. Конструкция должна обеспечить силу, прижимающую колеса к боковинам балки и превышающую центробежные, иначе вагон будет болтать из стороны в сторону. Расчеты показывают, что сопротивление движению вагона «Альвег» с учетом его массы и прижимающих сил в два с половиной раза больше, чем у вагона Попова. Кроме того, знакопеременные центробежные силы создают закручива- |








