Юный техник - для умелых рук 1973-06, страница 9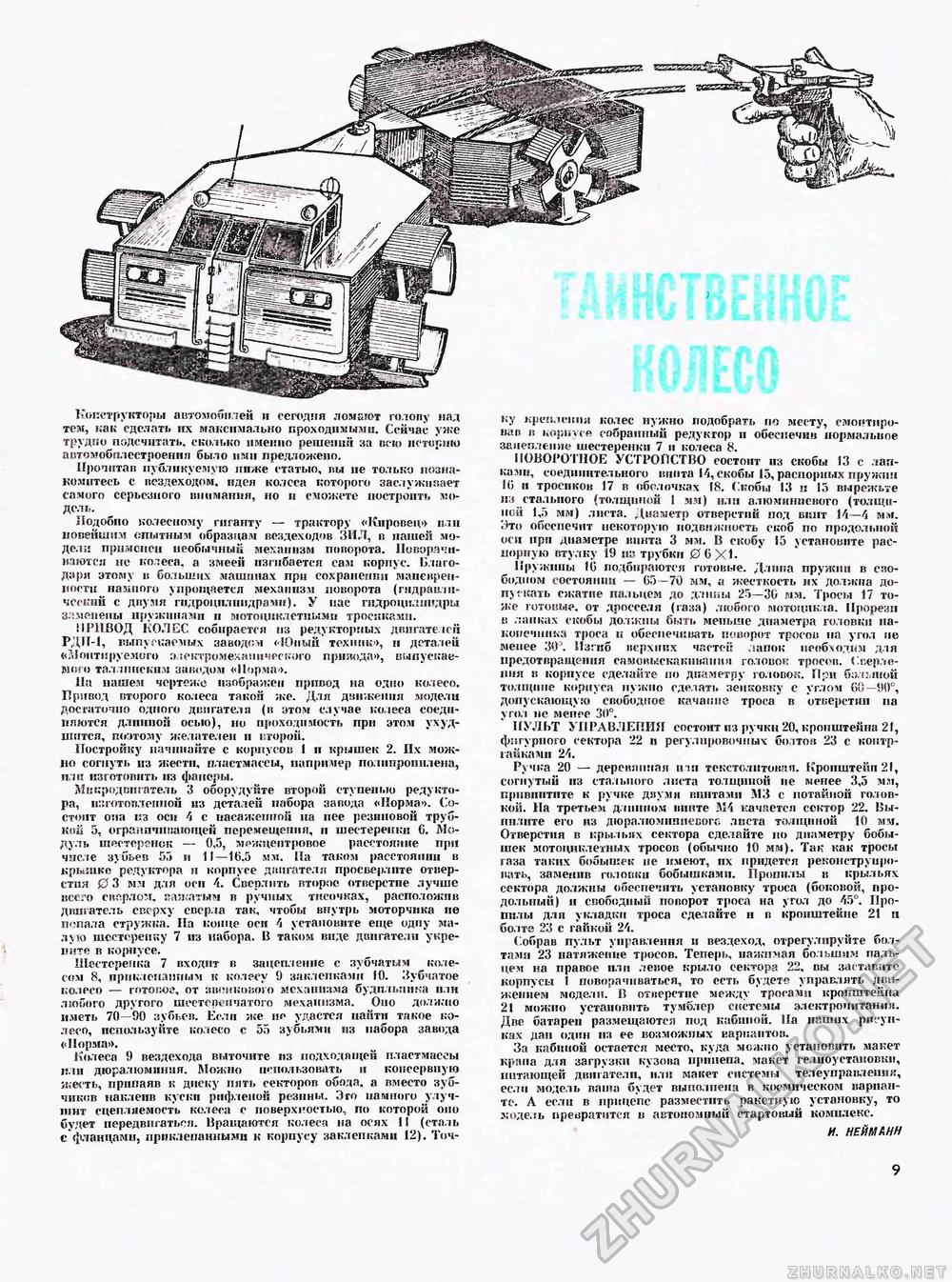
Конструкторы автомобилей и сегодня ломают голову над тем, как сделать их максимально проходимыми. Сейчас уже трудно подсчитать, сколько именно решений за всю историю автомобилестроения было ими предложено. Прочитав публикуемую ниже статью, вы не только познакомитесь с вездеходом, идея колеса которого заслуживает самого серьезного внимания, но и сможете построить модель. Подобно колесному гиганту — трактору «Кнровец>> или иовейш 1м опытным образцам вездеходов ЗИЛ, в нашей модели применен необычный механизм поворота. Поворачиваются не колеса, а змеей изгибается сам корпус. Благодаря этому в больших машинах при сохранении маневренности намного упрощается механизм поворота (гидравлический с двумя гндроцилнндрамн). У нас гндроннлнндры заменены пружинами и мотоциклетными тросиками. ПРИВОД КОЛЕС собирается из редукгорных двигателей РДН-1, выпускаемых заводом «Юный техник», н деталей «Монтируемого электромеханического привода», выпускаемого таллинским заводом «Норма». На нашем чертеже изображен привод на одно колесо. Привод второго колеса такой же. Для движения модели достаточно одного двигателя (в этом случае колеса соединяются длинной осыо), но проходимость при этом ухудшится, поэтому желателен и второй. Постройку начинайте с корпусов 1 н крышек 2. Их можно согнуть из жести, пластмассы, например полипропилена, пли изготовить из фанеры. Микродвигатель 3 оборудуйте второй ступенью редуктора, наготовленной из деталей набора завода «Норма». Состоит она из оси 4 с насаженной на нее резиновой трубкой 5, ограничивающей перемещения, и шестеренки 6. Модуль шестеренок — 0,5, межцептровое расстояние при числе зубьев 55 и II—16 5 мм. На таком расстоянии в крышке редуктора и корпусе двигателя просверлите отверстия 0 3 мм для осп 4. Свеплнть второе отверстие лучше всего сверлом, нажатым в ручных тисочках, расположив двигатель сверху сверла так, чтобы внутрь моторчика не попала стружка. На конце оси 4 установите еще одну малую шестеренку 7 из набора. В таком виде двигатели укрепите в корпусе. Шестеренка 7 входит в зацеп jeinie с зубчатым колесом 8, приклепанным к колесу 9 заклепками 10. Зубчатое колесо — готовой, от звенковою механизма будильника или любого другого шестеренчатого механизма. Оно должно иметь 70—90 зубьев. Если же не удастся найти такое колесо, используйте колесо с 55 зубьями из набора завода «Норма». Колеса 9 вездехода выточите из подходящей пластмассы или дюралюминия. Можно попользовать и консервную я есть, припаяв к диску пять секторов обода, а вместо зубчиков наклеив куски рифленой резины. Это намного улучшит сцепляемость колесч с поверхностью, по которой оно будет передвигаться. Вращаются колеса на осях 11 (сталь с фланцами, приклепанными к корпусу заклепками 12). Точ ку ьрепленпя колес нужно подобрать по месту, смонтировав в и >pnvee собранный редуктор и обеспечив нормальное за 1еяле ше шестеренки 7 и колеса 8. НОВОРОТНОЕ УСТРОЙСТВО состоит из скобы 13 с лапками, соединительного винта 14, скобы 15, распорных пружин 1(5 н тросиков 17 в оболочках 18. Скобы 13 и 15 вырежьте из ctj ibiioro (толщиной 1 мм) или алюминиевого (толщиной 1,5 мм) листа. Диаметр отверстий под винт 14—4 мм. Это обсспечпт некоторую подвижность скоб по продольной оси при диаметре винта 3 мм. В скобу 15 установите распорную втулку 19 из трубки 0 6X1- Пружины 10 подбираются готовые. Длина пружин в свободном состоянии — 65—70 мм, а жесткость их' должна допускать сжатие пальцем до длины 25—30 мм. Тросы 17 тоже готовые, от дросселя (газа) любого мотоцикла. Прорези в лапках скобы должны быть меньше диаметра головки наконечника троса и обеспечивать поворот тросов на угол не менее ЗО3. Изгиб верхних частей лапок необходим для предотвращения самовыскакнванич головок тросов. Сверления в корпусе сделайте по диаметру головок. При большой толщине корпуса нужно сделать зенковку с углом СО—90°, допускающую свободное качание троса в отверстии на угол не менее 30°. ПУЛЬТ УПРАВЛЕНИЯ состоит из ручки 20, кронштейна 21, фигурного сектора 22 и регулировочных бо ito« 23 с контргайками 24. Ручка 20 — деревянная i in текстолитовая. Кронштейн 21, согнутый из стального листа толщиной не менее 3,5 мм, привинтите к ручке двумя винтами МЗ с потайной головкой. На третьем длинном винте М4 качается сектор 22. Выпилите его из дюралюминиевого листа толщиной 10 мм. Отверстия в иры п>кх сектора сделайте по диаметру бобышек мотоциклетных тросов (обычно 10 мм). Так как тросы газа таких бобышек не имеют, их придется реконструировать, заменив головки бобышками. Пропилы в крыльях сектора должны обеспечить установку троса (боковой, продольный) н свободный поворот троса на угол до ^5°. Пропилы для укладки троса сделайте и в кронштейне 21 п болте 23 с гайкой 24. (обрав пульт управления и вездеход, отрегулируйте болтами 23 натяжение тросов. Теперь, нажимая бо ]ышш пальцем на правое или левое крыло сектора 22, вы заставите корпусы 1 поворачиваться, то есть будете управлять движением модели. В отверстие между тросами кронштейна 21 можно установить тумблер системы электропитания. Две батареи размещаются под кабиной. На наших рисунках дай один нз ее возможных вариантов. За кабиной остается место, куда можно установить макет крана для загрузки кузова прннепа. макет 1елноустановкн, питающей двигатели, или макет системы телеуправления, если модель ваша будет выполнена в космическом варианте. А если в прицепе разместить ракетную установку, то модель превратится в автономный стартовый комплекс. и. нейманн 9 |








