Юный техник - для умелых рук 1973-06, страница 8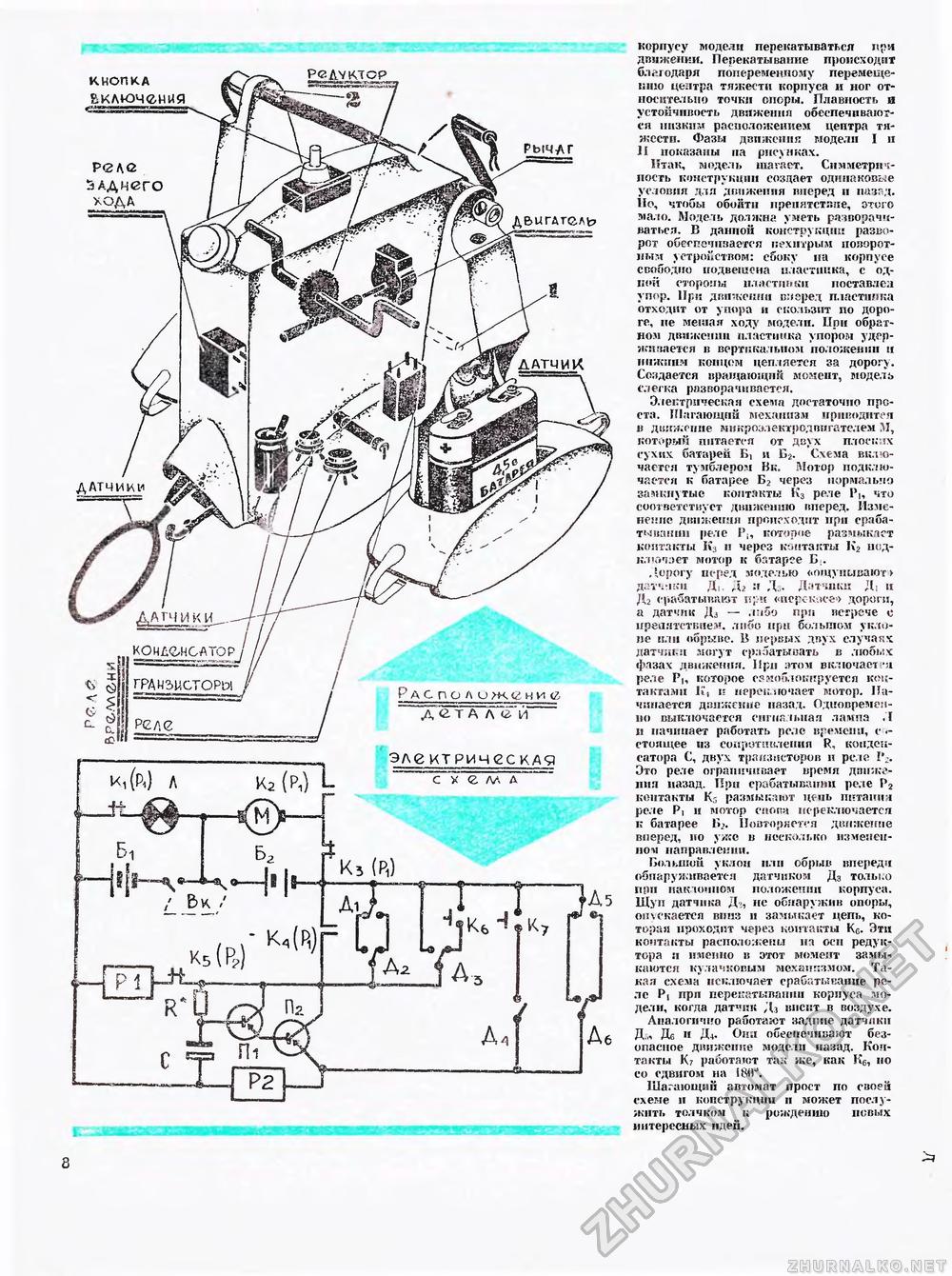
КНОПКА PCAVKT OP корпусу модели перекатываться при дпмж ении. Перекатывание происходЕ1Т благодаря попеременному перемещению центра тяжести корпуса и ног относ ггелыю точки опоры. Плавность я устойчивость движения обеспечиваются низким расположением цеитра тяжести. Фазы движения модели I п II показаны на рисунках. Итак, модель шагает. Симметричность конструкции создает одинаковые условия для движения вперед и назад. 11о, чтобы обойти препятствие, этого мало. Модель должна уметь разворачиваться. В данной конструкции разворот обеспечивается нехитрым новоротным устройством: сбоку на корпусе свободно подвешена пластинка, с одной стороны пластинкп поставлел упор. При движении вперед пластинка отходит от упора и скользит по дороге, не мешая ходу модели. При обратном движении пластинка упором удерживается в вертикальном положении и нижним концом цепляется за дорогу. Создается вращающий момент, модель слегка разворачивается. Электрическая схема достаточно проста. Шчгающпй механизм приводится в движение микроалекхродвигателем М, кот »рын питается от дс\ х плоских сухих батарей Б] и Б2. Схема включается тумблером Вк. Мотор подключается к батарее Б2 через нормально замкнутые контакты К3 реле Pi, что соответствует движению вперед. Изменение движения происходит при срабатывании реле Р^ которое раз» «каст контакты К3 н через контакты К2 подключает мотор к батарее Б.. , -opoi у перед моделью пощупывают > датчики Д,. Д2 и Д> Датчики Д; и Д2 срабатывают при «перокмсе'> дороги, а датчик Д3 — лноо при встрече с препятствием. либо при большом уклоне или обрыве. В первых двух случаях датчики могут срабатывать в любых фазах движения. Ирм этом вк мочает -а реле Pi, которое сзкоолонпруется кок-тактами К', и переключает мотор. Начинается движение назад. Одновременно вь ключаегся сигнальная лампа .1 и начинает работать реле времени, с <-стоящее из сопротивления R, конденсатора С, двух транзисторов и реле Это реле ограничивает время движения назад. При срабатывании реле Р2 контакты К.-, размыкают цепь питания реле Pi и мотор снова переключается к батарее Б>. Повторяется движение вперед, но уже в несколько измененном направлении. Ботьшой уклон нлн обрыв впереди обнаруживаете* датчиком Д3 толы.о при наклонном положении корпуса. Щуп датчика Д-;, не обнаружив опоры, опускается вниз и замыкает цепь, которая проходит через контакты Кб. Эти контакты расположены на осн редуктора и именно в этот момент замыкаются кулачковым механизмом. Такая схема исключает срабатывание реле Pi при перекатывании корпуса модели, когда датчик Д3 висит в воздухе. Аналогично работают задние датчики Д.„ Дб и Да. Они обеспечивают безопасное движение модели назад. Контакты К7 раоотают так же, как К6, но со сдвигом на 180°. Шагающий автомат прост по своей схеме и конструкции и может послужить толчком к рождению новых интересных идеи. 8 |








