Юный техник 1965-02, страница 63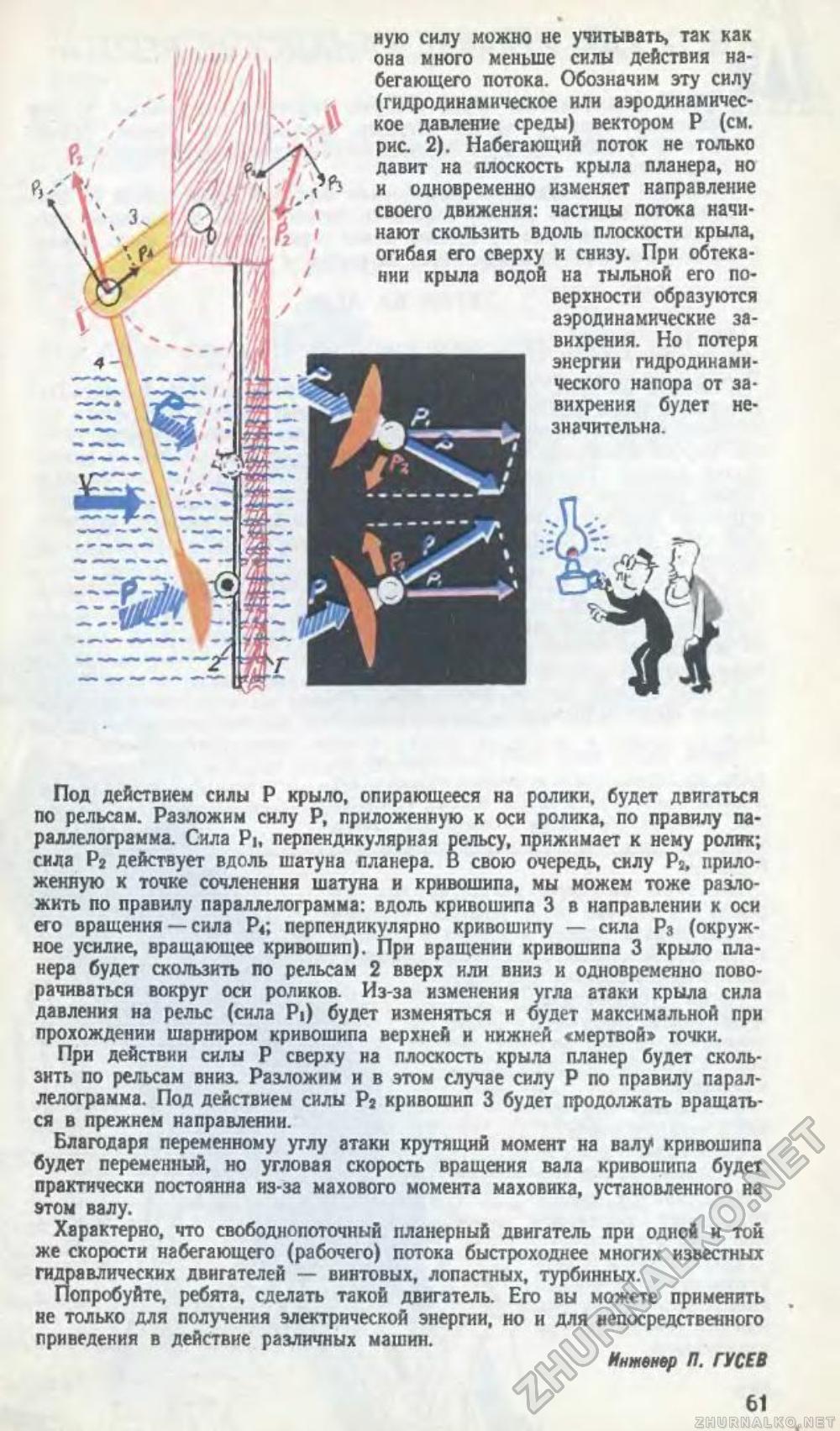
Под действием силы Р крыло, опирающееся на ролики, будет двигаться по рельсам. Разложим силу Р, приложенную к оси ролика, по правилу параллелограмма. Сила Pi, перпендикулярная рельсу, прижимает к нему ролик; сила Рг действует вдоль шатуна планера. В свою очередь, силу Р5, приложенную к точке сочленения шатуна и кривошипа, мы можем тоже разложить по правилу параллелограмма: вдоль кривошипа 3 в направлении к оси его вращения — сила Р«; перпендикулярно кривошипу — сила Рз (окружное усилие, вращающее кривошип). При вращении кривошипа 3 крыло планера будет скользить по рельсам 2 вверх или вниз и одновременно поворачиваться вокруг оси роликов. Из-за изменения угла атаки крыла сила давления на рельс (сила Pi) будет изменяться и будет максимальной при прохождении шарниром кривошипа верхней и нижней «мертвой» точки. При действии силы Р сверху на плоскость крыла планер будет скользить по рельсам вниз. Разложим н в этом случае силу Р по правилу параллелограмма. Под действием силы Р2 кривошип 3 будет продолжать вращаться в прежнем направлении. Благодаря переменному углу атаки крутящий момент на валу кривошипа будет переменный, но угловая скорость вращения вала кривошипа будет практически постоянна из-за махового момента маховика, установленного на Характерно, что свободнопоточный планерный двигатель при одной и той же скорости набегающего (рабочего) потока быстроходнее многих известных гидравлических двигателей — винтовых, лопастных, турбинных. Попробуйте, ребята, сделать такой двигатель. Его вы можете применить не только для получения электрической энергии, но и для непосредственного приведения в действие различных машин. Интенвр П. ГУСЕВ 61 |








