Юный техник 1969-10, страница 48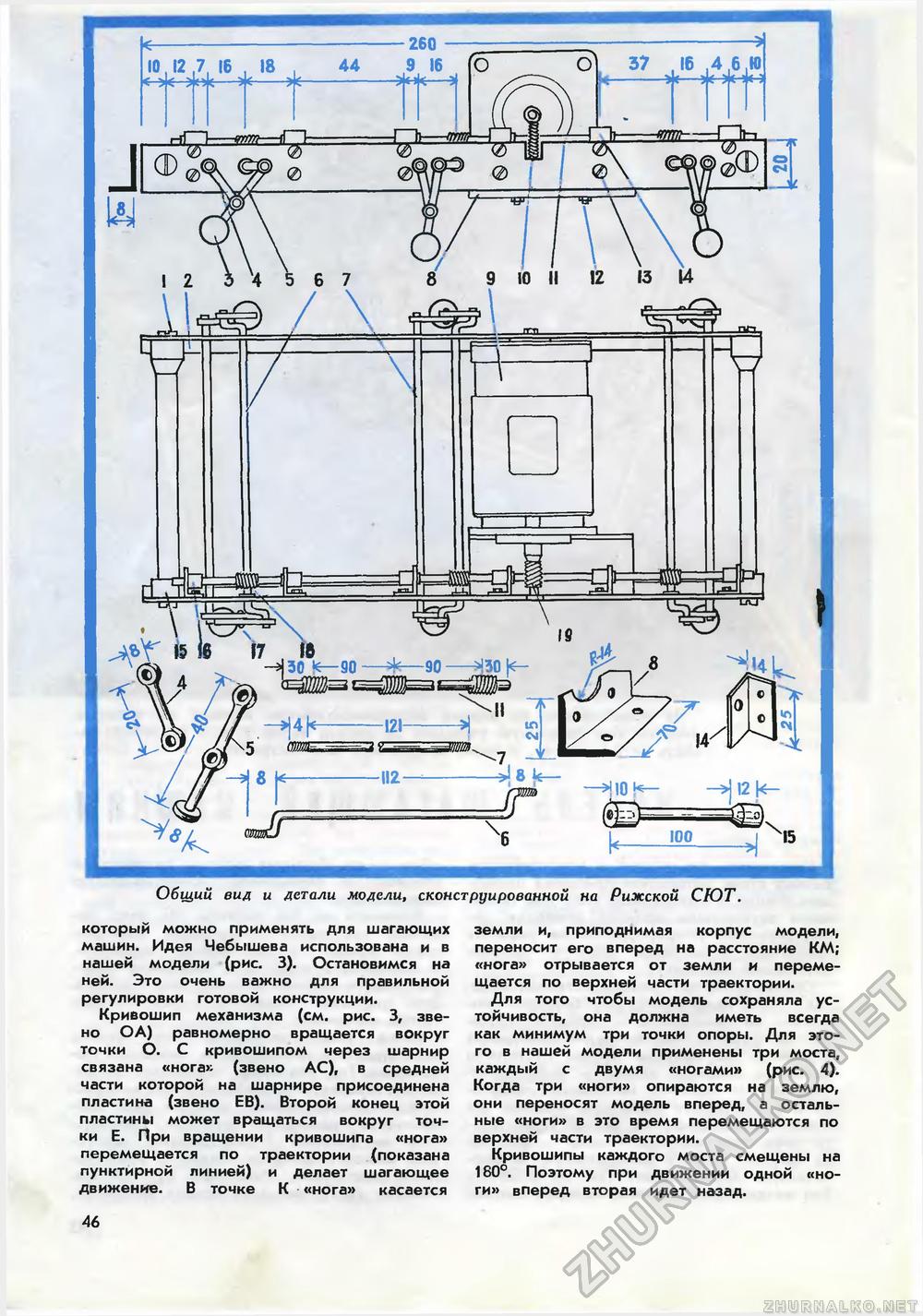
10,12 7 16 18 44 с >к а ее—-ф- _riO «rrrn—ri 1- 6 7 9 10 II 1Z 13 14 \ I II г g -^12 К- 15 Общий вид и детали модели, сконструированной на Рижской СЮТ. который можно применять для шагающих машин. Идея Чебышева использована и в нашей модели (рис. 3). Остановимся на ней. Это очень важно для правильной регулировки готовой конструкции. Кривошип механизма (см. рис. 3, звено OA) равномерно вращается вокруг точки О. С кривошипом через шарнир связана «нога» (звено АС), в средней части которой на шарнире присоединена пластина (звено ЕВ). Второй конец этой пластины может вращаться вокруг точки Е. При вращении кривошипа «нога» перемещается по траектории (показана пунктирной линией) и делает шагающее движение. В точке К «нога» касается земли и, приподнимая корпус модели, переносит его вперед на расстояние КМ; «нога» отрывается от земли и перемещается по верхней части траектории. Для того чтобы модель сохраняла устойчивость, она должна иметь всегда как минимум три точки опоры. Для этого в нашей модели применены три моста, каждый с двумя «ногами» (рис. 4). Когда три «ноги» опираются на землю, они переносят модель вперед, а остальные «ноги» в это время перемещаются по верхней части траектории. Кривошипы каждого моста смещены на 180°. Поэтому при движении одной «ноги» вперед вторая идет назад. 46 |








