Юный техник 1971-03, страница 52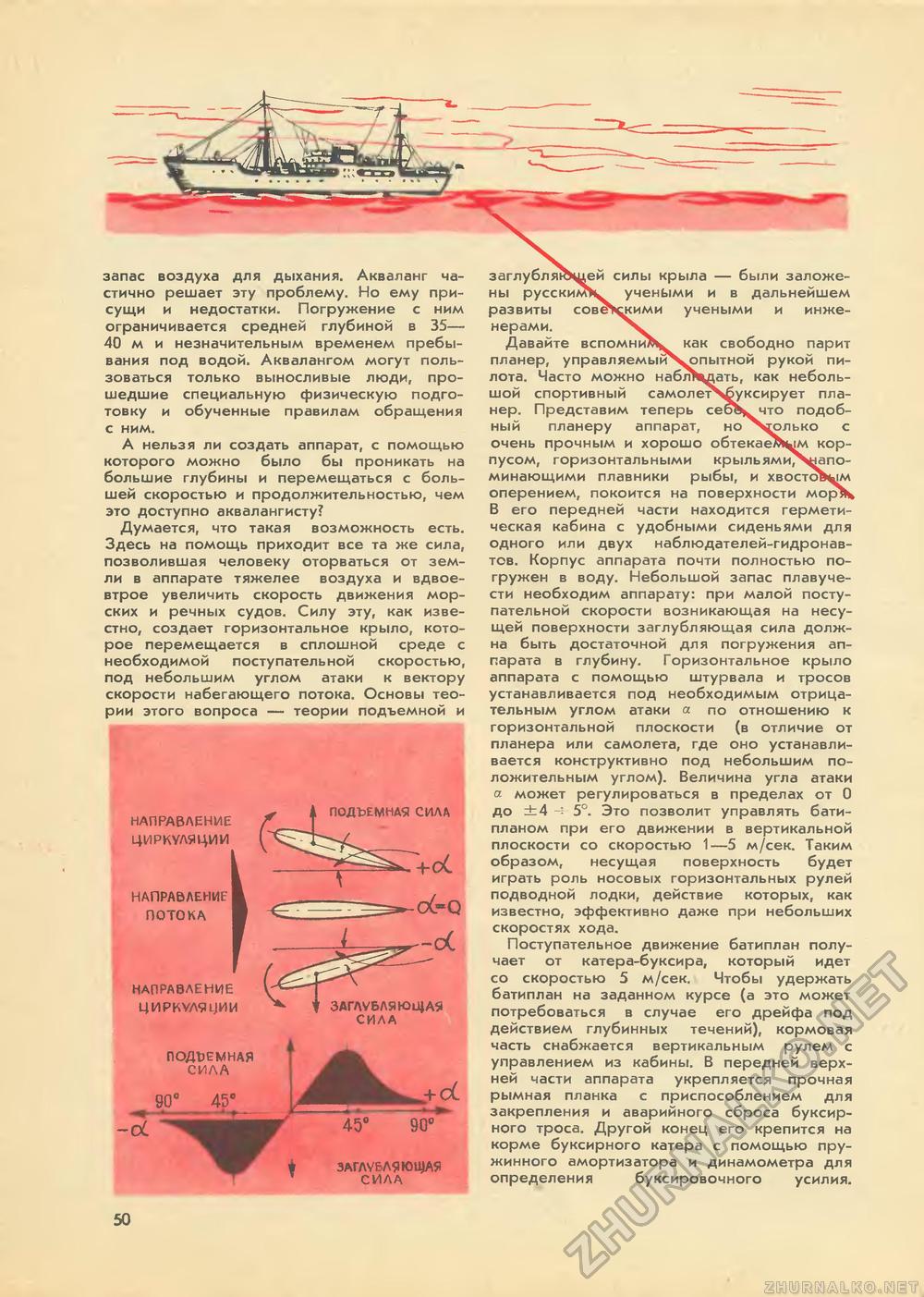
запас воздуха для дыхания. Акваланг частично решает эгу проблему. Но ему присущи и недостатки. Погружение с ним ограничивается средней глубиной в 35— 40 м и незначительным временем пребывания под водой. Аквалангом могут пользоваться только выносливые люди, прошедшие специальную физическую подготовку и обученные правилам обращения с ним А нельзя ли создать аппарат, с помощью которого можно было бы проникать на большие глубины и перемещаться с большей скоростью и продолжительностью, чем это доступно аквалангисп у? Думается, что такая возможность есть. Здесь на помощь приходит все та же сила, позволившая человеку оторваться от земли в аппарате тяжелее воздуха и вдвое втрое увеличить скорость движения морских и речных судов. Силу эту, как известно, создает горизонтальное крыло, которое перемещается в сплошной среде с необходимой гоступательной скоростью, под небольшим углом атаки к вектору скорос1И набегающего потока. Основы теории этого вопроса — теории подъемной и направление циркуляции НАПРАВЛЕНИЕ ПОТОКА НАПРАВЛЕНИЕ циркуляции подъемная сила -cL ЗАГЛУБЛЯЮЩАЯ с' а заглублявшей силы крыла — были заложены русским)^ учеными и в дальнейшем развиты советскими учеными и инженерами. Давайте вспомни^, как свободно парит планер, управляемыи^^>пытной рукой пилота. Часто можно наблЦдать, как небольшой спортивный самолет-^уксирует планер Представим теперь сеов^что подобный планеру аппарат, но _>лько с очень прочным и хорошо обтекаеЛц-м корпусом, горизонтальными крыльями,^напо-минающими плавники рыбы, и хвостоЬ -м оперением, покоится на поверхности мор; В его передней части находится герметическая кабина с удобными сиденьями для одного или двух наблкэ цателей-гидр онав-тов. Корпус аппарата почти полностью погружен в воду Небольшой ззпас плавучести необходим аппарату: при малой поступательной скорости возникаюшая на несущей поверхности заглубляющая сила должна быть достаточной для погружения аппарата в глубину. Горизонтальное крыло аппарат а с помощью штурвала и тросов устанавливается под необходимым отрицательным углом атаки а по отношению к горизонтальной плоскости (в отличие от планера или самолета, где оно устанавливается коне труктивно под небольшим по-ложительным углом). Величина угла атаки а может регулироваться в пределах от 0 до ±4 5°. Это позволит управлять батипланом при его движении в вертикальной плоскости со скоростью 1—5 м/сек. Таким образом, несущая поверхность будет играть роль носовых горизонтальных рулей подводной лодки, действие которых, как известно, эффективно даже при небольших скоростях хода. Поступательное движение батиплан получает от катера-буксира, который идет со скоростью 5 м/сек Чтобы удержать батиплан на заданном курсе (а это может потребоваться в случае его дрейфа под действием глубинных течений), кормовая часть снабжается вертикальным рулем с управлением из кабины. В передней верхней части аппарата укрепляется прочная рымная планка с приспособлением для закрепления и аварийного сброса буксирного троса. Другой конец его крепится на корме буксирного катера с помощью пружинного амортизатора и динамометра для определения буксировочного усилия. 50 |








