Юный техник 1975-11, страница 68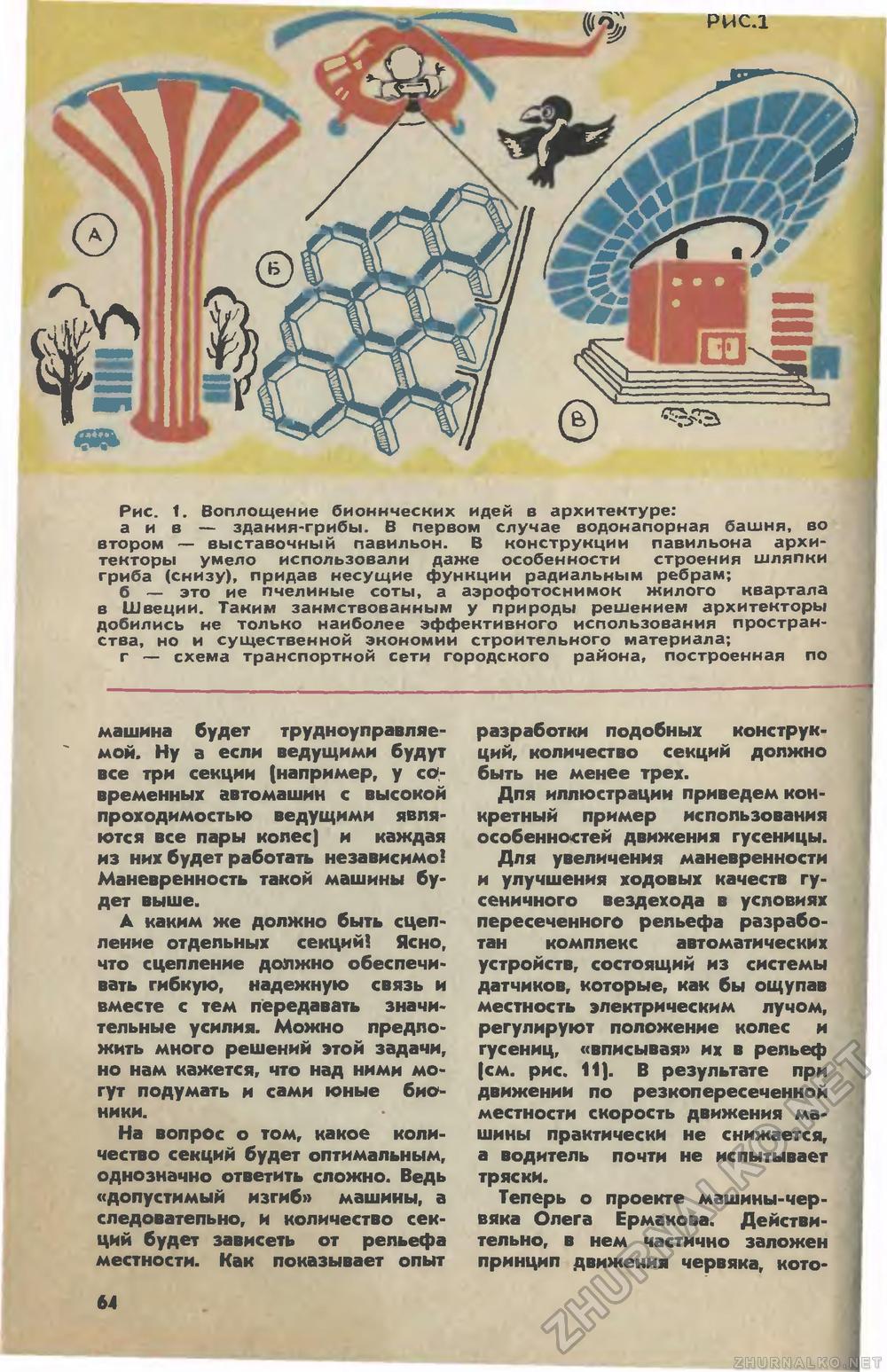
РИС.1 Рис. 1. Воплощение бионических идей в архитектуре: айв — здания-грибы. В первом случае водонапорная башня, во втором — выставочный павильон. В конструкции павильона архитекторы умело использовали даже особенности строения шляпки гриба (снизу), придав несущие функции радиальным ребрам; 6 — это не пчелиные соты, а аэрофотоснимок жилого квартала в Швеции. Таким заимствованным у природы решением архитекторы добились не только наиболее эффективного использования пространства, но и существенной экономии строительного материала; г — схема транспортной сети городского района, построенная по машина будет трудноуправляемой. Ну а если ведущими будут все три секции (например, у современных автомашин с высокой проходимостью ведущими являются все пары колес) и каждая из них будет работать независимо! Маневренность такой машины будет выше. Л каким же должно быть сцепление отдельных секций! Ясно, что сцепление должно обеспечивать гибкую надежную связь и вместе с тем передавать значительные усилия. Можно предложить много решений этой задачи, но нам кажется, что над ними могут подумать и сами юные бионики. На вопрос о том, какое количество секций будет оптимальным, однозначно ответить сложно. Ведь «допустимый изгиб» машины, а следовательно, и количество секций будет зависеть от рельефа местности. Как показывает опыт разработки подобных конструкций, количество секций должно быть не менее трех. Дпя иллюстрации приведем конкретный пример использования особенностей движения гусеницы. Для увеличения маневренности и улучшения ходовых качеств гусеничного вездехода в условиях пересеченного рельефа разработан комплекс автоматических устройств состоящий из системы датчиков, которые, как бы ощупав местность электрическим лучом, регулируют положение колес и гусениц, «вписывая» их в рельеф (см. рис. 11). В результате при движении по резкопересеченной местности скорость движения машины практически не снижается, а водитель почти не испытывает тряски. Теперь о проекте машины-червяка Олега Ермакова. Действительно, в нем частично заложен принцип движения червяка, кото- 64 |








