Юный техник 1975-11, страница 65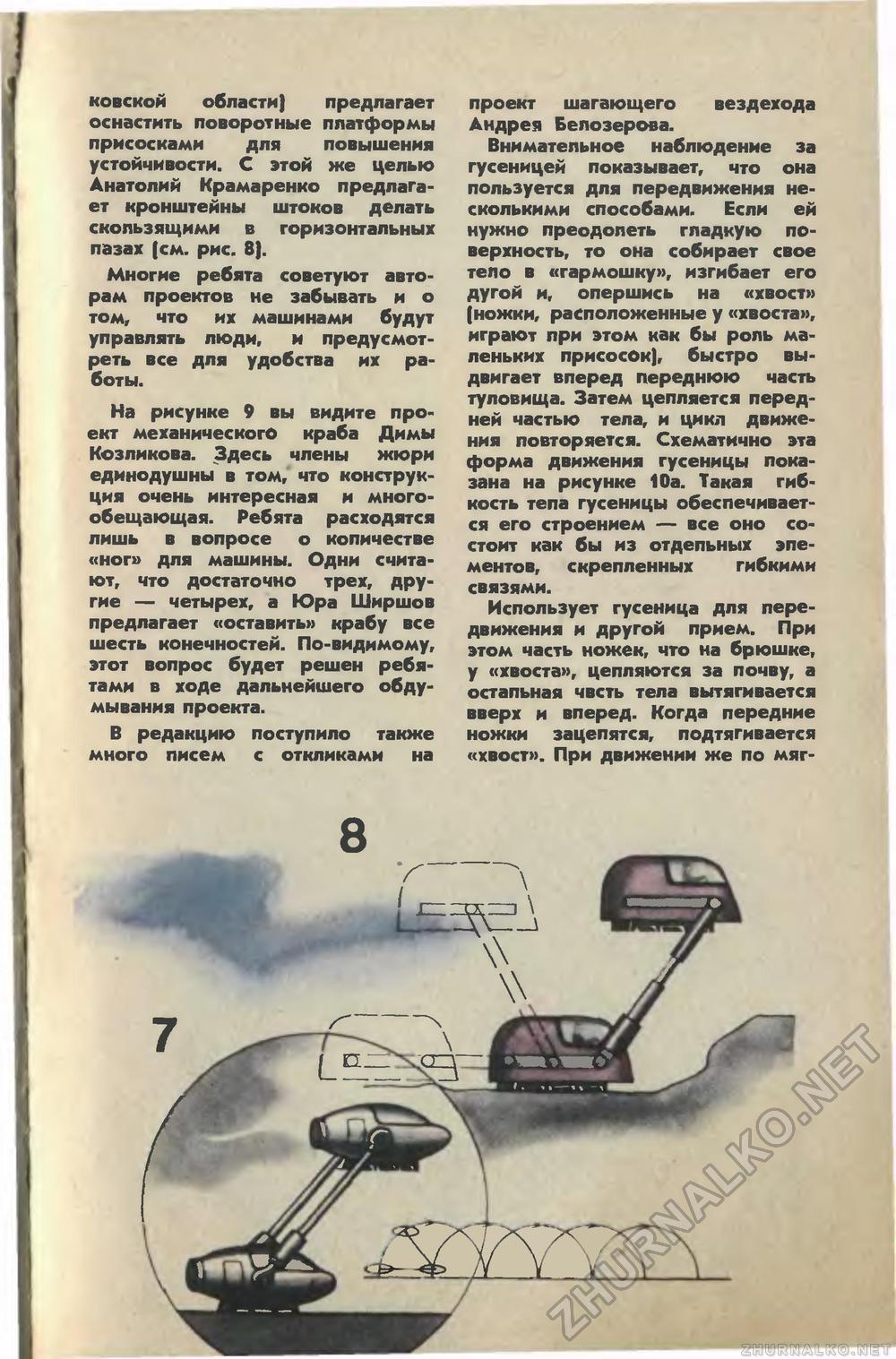
ковской области) предлагает оснастить поворотные платформы присосками для повышения устойчивости. С этой же целью Анатолий Крамаренко предлагает кронштейны штоков делать скользящими в горизонтальных пазах (см. рис. 8). Многие ребята советуют авторам проектов не забывать и о том, что их машинами будут управлять люди, и предусмотреть все для удобства их работы. На рисунке 9 вы видите проект механического краба Димы Козликова. Здесь члены жюри единодушны в том, что конструкция очень интересная и многообещающая. Ребята расходятся лишь в вопросе о количестве «ног» для машины. Одни считают, что достаточно трех, другие — четырех, а Юра Ширшов предлагает «оставить» крабу все шесть конечностей. По-видимому, этот вопрос будет решен ребятами в ходе дальнейшего обдумывания проекта. В редакцию поступило также много писем с откликами на проект шагающего вездехода Андрея Белозерова. Внимательное наблюдение за гусеницей показывает, что она пользуется для передвижения несколькими способами. Если ей нужно преодолеть гладкую поверхность, то она собирает свое тело в «гармошку», изгибает его дугой и, опершись на «хвост» (ножки, расположенные у «хвоста», играют при этом как бы роль маленьких присосок), быстро выдвигает вперед переднюю часть туловища. Затем цепляется передней частью тела, и цикл движения повторяется. Схематично эта форма движения гусеницы показана на рисунке 10а. Такая гибкость тепа гусеницы обеспечивается его строением — все оно состоит как бы из отдельных элементов, скрепленных гибкими связями. Использует гусеница для передвижения и другой прием. При этом часть ножек, что на брюшке, у «хвоста», цепляются за почву, а остальная чвсть тела вытягивается вверх и вперед. Когда передние ножки зацепятся, подтягивается «хвост». При движении же по мяг- |








