Юный техник 1976-03, страница 60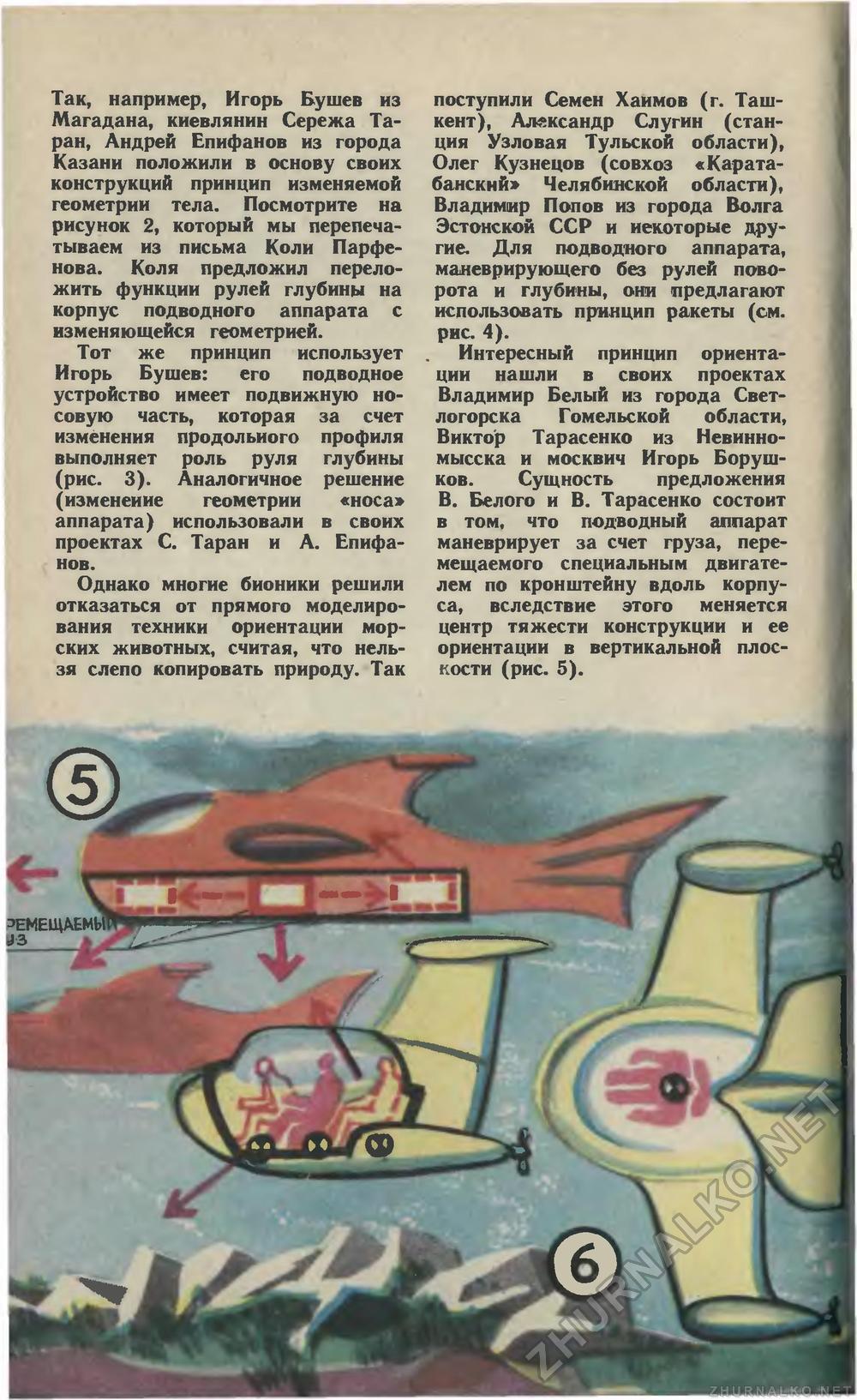
Так, например, Игорь Бушев из Магадана, киевлянин Сережа Таран, Андрей Епифанов из города Казани положили в основу своих конструкций принцип изменяемой геометрии тела. Посмотрите на рисунок 2, который мы перепечатываем из письма Коли Парфенова. Коля предложил переложить функции рулей глубины на корпус подводного аппарата с изменяющейся геометрией. Тот же принцип использует Игорь Бушев: его подводное устройство имеет подвижную носовую часть, которая за счет изменения продольного профиля выполняет роль руля глубины (рис. 3). Аналогичное решение (изменение геометрии «носа» аппарата) использовали в своих проектах С. Таран и А. Епифанов. Однако многие бионики решили отказаться от прямого моделирования техники ориентации морских животных, считая, что нельзя слепо копировать природу. Так поступили Семен Хаимов (г. Ташкент), Александр Слугин (станция Узловая Тульской области), Олег Кузнецов (совхоз «Карата-банскнй» Челябинской области), Владимир Попов из города Волга Эстонской ССР и некоторые другие. Для подводного аппарата, маневрирующего без рулей поворота и глубины, они предлагают использовать принцип ракеты (см. рис. 4). Интересный принцип ориентации нашли в своих проектах Владимир Белый из города Светлогорска Гомельской области, Виктор Тарасенко из Невинно-мысска и москвич Игорь Боруш-ков. Сущность предложения В. Белого и В. Тарасенко состоит в том, что подводный аппарат маневрирует за счет груза, перемещаемого специальным двигателем по кронштейну вдоль корпуса, вследствие этого меняется центр тяжести конструкции и ее ориентации в вертикальной плоскости (рис. 5). |








