Юный техник 1979-06, страница 21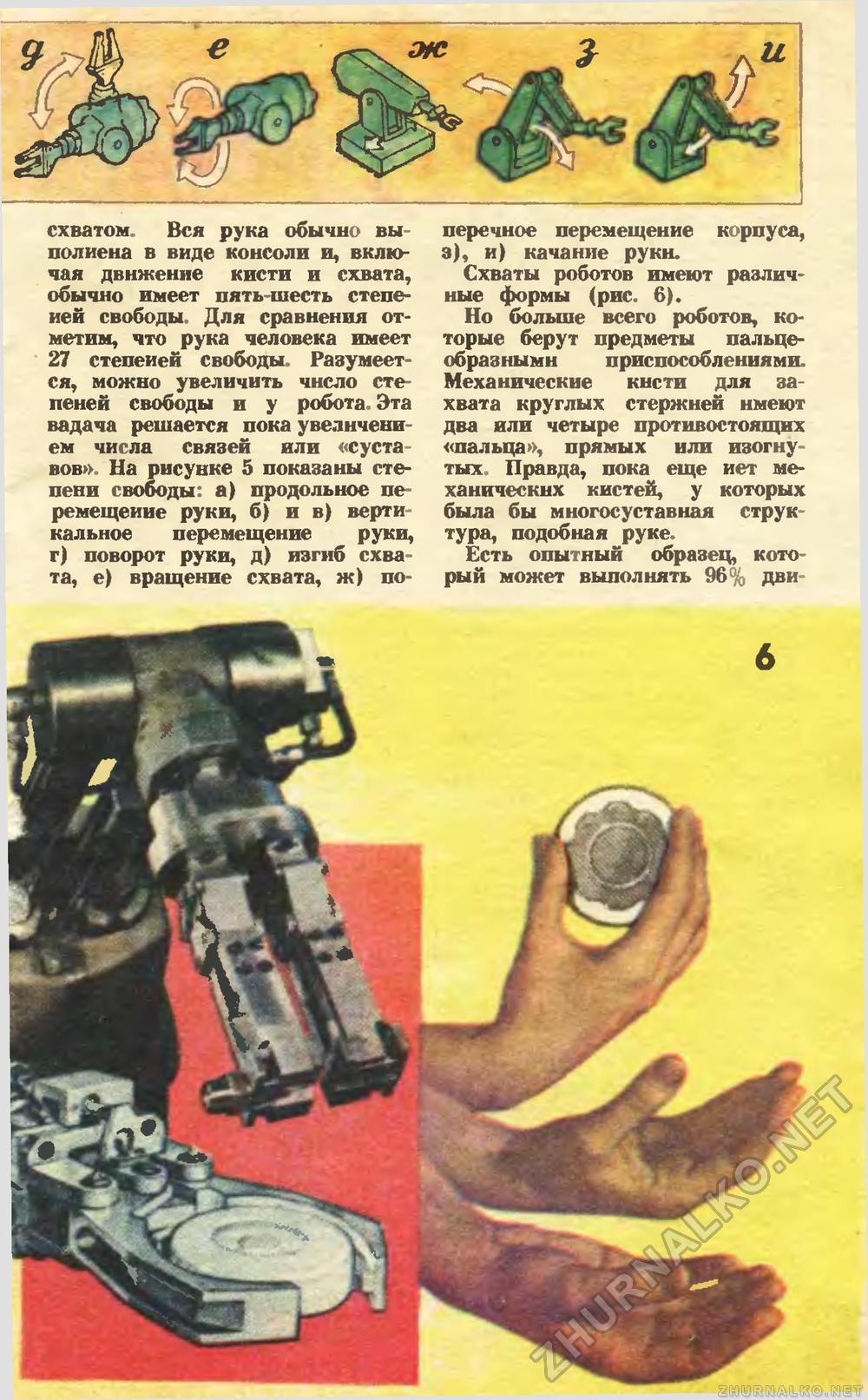
схватом Вся рука обычно вы полнена в виде консоли и, включая движение кисти и схвата, обычно имеет пять-шесть степеней свободы. Для сравнения отметим, что рука человека имеет 27 степеней свободы Разумеется, можно увеличить число степеней свободы и у робота. Эта вадача решается пока увеличением числа связей или «суста вов» На рисунке 5 показаны степени свободы а) продольное пе ремещеиие руки, б) и в) верти кальное перемещение руки, г) поворот руки, д) изгиб схвата, е) вращение схвата, ж) по перечное перемещение корпуса, з), и) качание рукн. Схваты роботов имеют различные формы (рис. 6). Но больше всего роботов, которые берут предметы пальцеобразными приспособлениями. Механические кнсти для захвата круглых стержней имеют два или четыре противостоящих «пальца», прямых или изогну тых Правда, пока еще иет механических кистей, у которых была бы многосуставная структура, подобная руке Есть опытный образец, который может выполнять 96% дви |








