Юный техник 1979-06, страница 23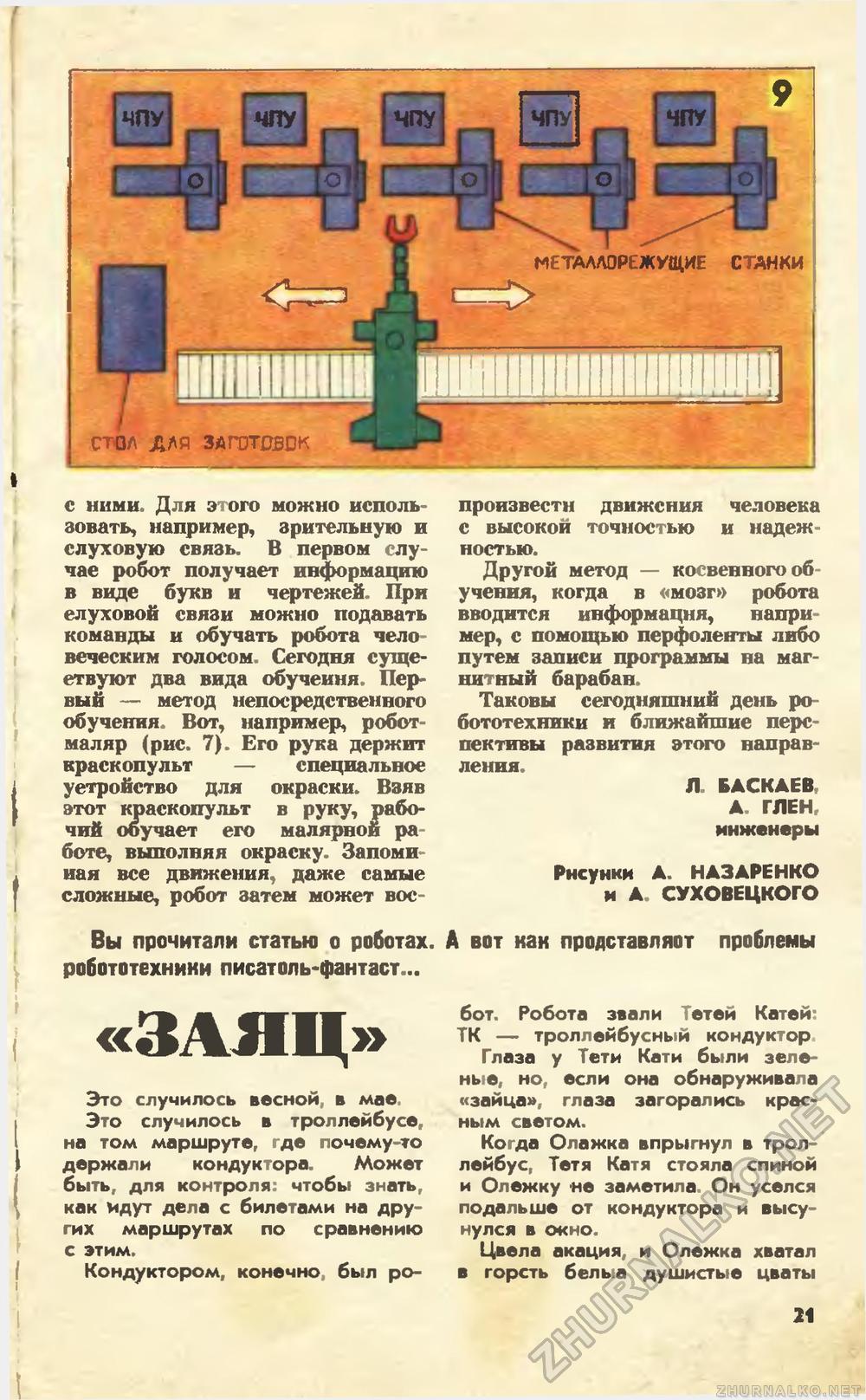
с ними Для этого можно использовать, например, зрительную и слуховую связь. В первом случае робот получает информацию в виде букв и чертежей При елуховой связи можно подавать команды и обучать робота чело веческим голосом. Сегодня существуют два вида обучения Первый — метод непосредственного обучения Вот, например, робот-маляр (рис. 7). Его рука держит краскопульт — специальное устройство для окраски. Взяв этот краскопульт в руку, рабочий обучает его малярной работе, выполняя окраску Запоми иая все движения, даже самые сложные, робот затем может вос- Вы прочитали статью о роботах, робототехниии писатоль-фантаст... «ЗАЯЦ» Это случилось весной, в мае Это случилось в троллейбусе, на том маршруте, где почему-то держали кондуктора. Может быть, для контроля: чтобы знать, как Идут дела с билетами на других маршрутах по сравнению с этим. Кондуктором, конечно был ро- произвестн движения человека с высокой точностью и надеж ностью. Другой метод — косвенного обучения, когда в «мозг» робота вводится информация, напри мер, с помощью перфоленты либо путем записи программы на маг-н и ный барабан Таковы сегодняшний день робототехники и ближайшие перспективы развития этого направления. Л. БАСКАЕВ, А. ГЛЕН инженеры Рисунки А. НАЗАРЕНКО и А. СУХОВЕЦКОГО бот. Робота заали Тетей Катей-ТК — троллейбусный кондуктор Глаза у Тети Кати были зеленые, но, если она обнаруживала «зайца», глаза загорались красным светом. Ко да Олажка впрыгнул в троллейбус, Тетя Катя стояла спиной и Олежку не заметила Он уселся подальше от кондуктора и высу нулся в окно. Цвела акация и Олежка хватал в горсть белые душистые цваты 21 А вот как продставляот проблемы |








