Техника - молодёжи 1975-11, страница 26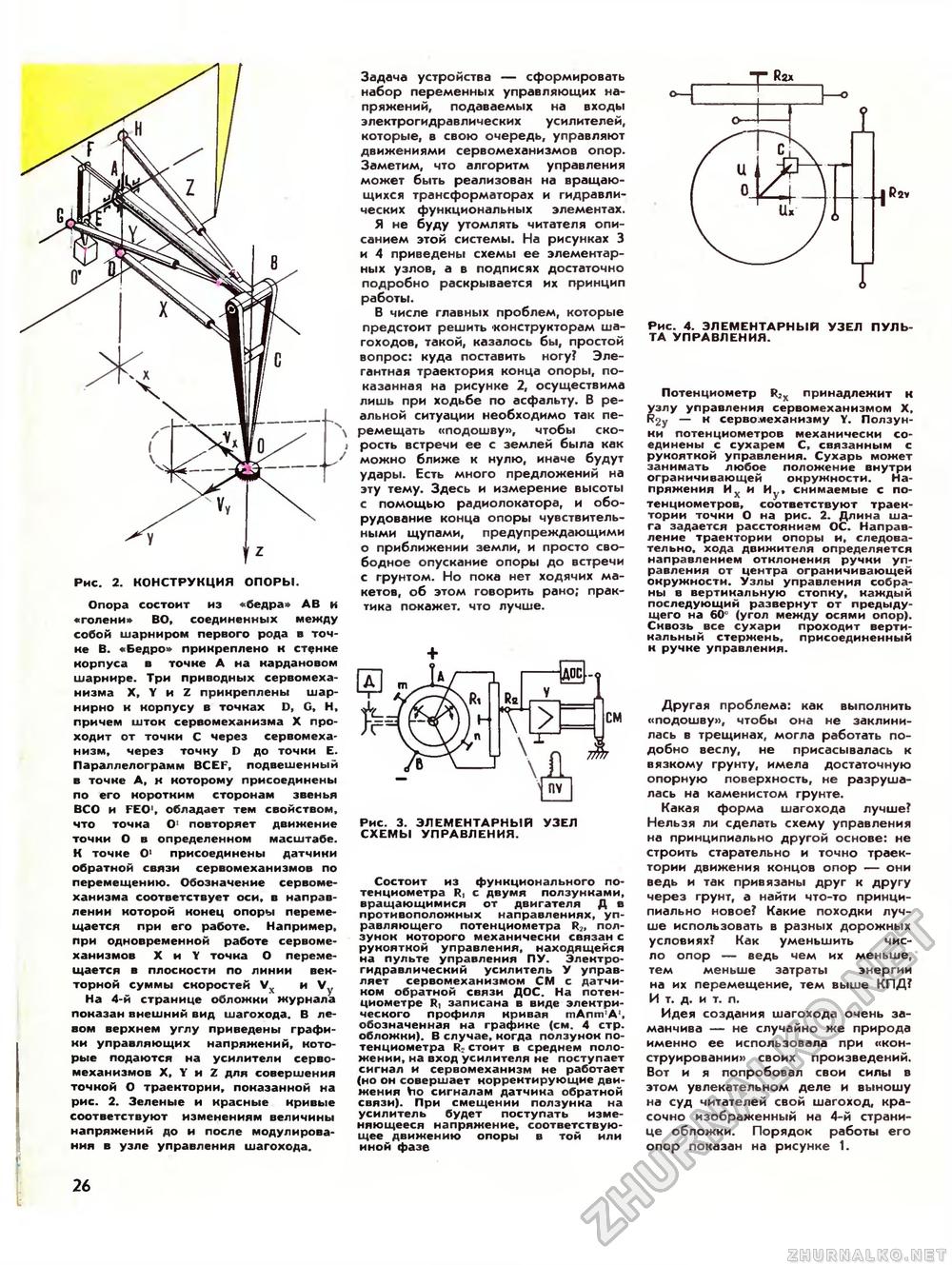
Опора состоит из «бедра» АВ и «голени» ВО, соединенных между собой шарниром первого рода в точке В. «Бедро» прикреплено к стенке корпуса в точке А на кардановом шарнире. Три приводных сервомеханизма X, Y и Z принреплены шар-нирно к корпусу в точнах D, С, Н, причем шток сервомеханизма X проходит от точки С через сервомеханизм, через точку D до точки Е. Параллелограмм BCEF, подвешенный в точке А, н которому присоединены по его норотким сторонам звенья ВСО и FEO', обладает тем свойством, что точка О' повторяет движение точни О в определенном масштабе. К точке О' присоединены датчини обратной связи сервомеханизмов по перемещению. Обозначение сервомеханизма соответствует оси, в направлении которой конец опоры перемещается при его работе. Например, при одновременной работе сервомеханизмов X и Y точка О перемещается в плоскости по линии векторной суммы скоростей Vx и V На 4-й странице обложки журнала показан внешний вид шагохода. В левом верхнем углу приведены графини управляющих напряжений, которые подаются на усилители сервомеханизмов X, Y и Z для совершения точкой О траектории, показанной на рис. 2. Зелень.е и красные кривые соответствуют изменениям величины напряжений до и после модулирования в узле управления шагохода. Задача устройства — сформировать набор переменных управляющих напряжений, подаваемых на входы электрогидравлических усилителей, которые, в свою очередь, управляют движениями сервомеханизмов опор. Заметим, что алгоритм управления может быть реализован на вращающихся трансформаторах и гидравлических функциональных элементах. Я не буду утомлять читателя описанием этой системы. На рисунках 3 и 4 приведены схемы ее элементарных узлов, а в подписях достаточно подробно раскрывается их принцип работы. В числе главных проблем, которые предстоит решить конструкторам ша-гоходов, такой, казалось бы, простой вопрос: куда поставить ногу? Элегантная траектория конца опоры, показанная на рисунке 2, осуществима лишь при ходьбе по асфальту. В реальной ситуации необходимо так перемещать «подошву», чтобы скорость встречи ее с землей была как можно ближе к нулю, иначе будут удары. Есть много предложений на эту тему. Здесь и измерение высоты с помощью радиолокатора, и оборудование конца опоры чувствительными щупами, предупреждающими о приближении земли, и просто свободное опускание опоры до встречи с грунтом. Но пока нет ходячих макетов, об этом говорить рано; практика покажет, что лучше. Рис. 3. ЭЛЕМЕНТАРНЫЙ УЗЕЛ СХЕМЫ УПРАВЛЕНИЯ Состоит из функционального потенциометра R, с двумя ползунками, вращающимися от двигателя Д в противоположных направлениях, управляющего потенциометра R2f ползунок иоторого механичесни связан с руноятной управления, находящейся на пульте управления ПУ. Электро-гидравличе кий усилитель У управляет сервомеханизмом СМ с датчиком обратной связи ДОС. На потенциометре R, записана в виде электрического профиля кривая тАпт А', обозначенная на графике (см. 4 стр. обложки). В случае, когда ползунок потенциометра R стоит в среднем положении, на вход усилителя не поступает сигнал и сервомеханизм не работает (но он совершает корректирующие движения Vio сигналам датчика обратной связи). При смещении ползунка на усилитель будет поступать изменяющееся напряжение, соответствующее движению опоры в той или иной фазе Рис. 4. ЭЛЕМЕНТАРНЫЙ УЗЕЛ ПУЛЬТА УПРАВЛЕНИЯ. Потенциометр R3)c принадлежит к злу управления сервомеханизмом X, 2у — н сервомеханизму V. Ползунки потенциометров механичесни соединены с сухарем С, связанным с рукояткой управления. Сухарь может занимать любое положение внутри ограничивающей окружности. Напряжения Их и И3 , снимаемые с потенциометров, соответствуют траектории точки О на рис. 2. Длина шага задается расстоянием ОС. Направление траектории опоры и, следовательно, хода движителя определяется направлением отклонения ручки управления от центра ограничивающей окружности. Узлы управления собраны в вертинальную стопку, каждый последующий развернут от предыдущего на 60" (угол между осями опор). Сквозь все сухари проходит вертикальный стержень, присоединенный н ручке управления. Другая проблема: как выполнить «подошву», чтобы она не заклинилась в трещинах, могла работать подобно веслу, не присасывалась к вязкому грунту, имела достаточную опорную поверхность, не разрушалась на каменистом грунте. Какая форма шагохода лучше? Нельзя ли сделать схему управления на принципиально другой основе: не строить старательно и точно траектории движения концов опор — они ведь и так привязаны друг к другу через грунт, а найти что-то принципиально новое? Какие походки лучше использовать в разных дорожных условиях? Как уменьшить число опор — ведь чем их меньше, тем меньше затраты энергии на их перемещение, тем выше КПД? И т. д. и т. п. Идея создания шагохода очень заманчива — не случайно же природа именно ее использовала при «конструировании» своих произведений. Вот и я попробовал свои силы в этом увлекательном деле и выношу на суд читателей свой шагоход, красочно изображенный на 4-й странице обложки. Порядок работы его опор показан на рисунке 1. 26 |








