Техника - молодёжи 1996-04, страница 23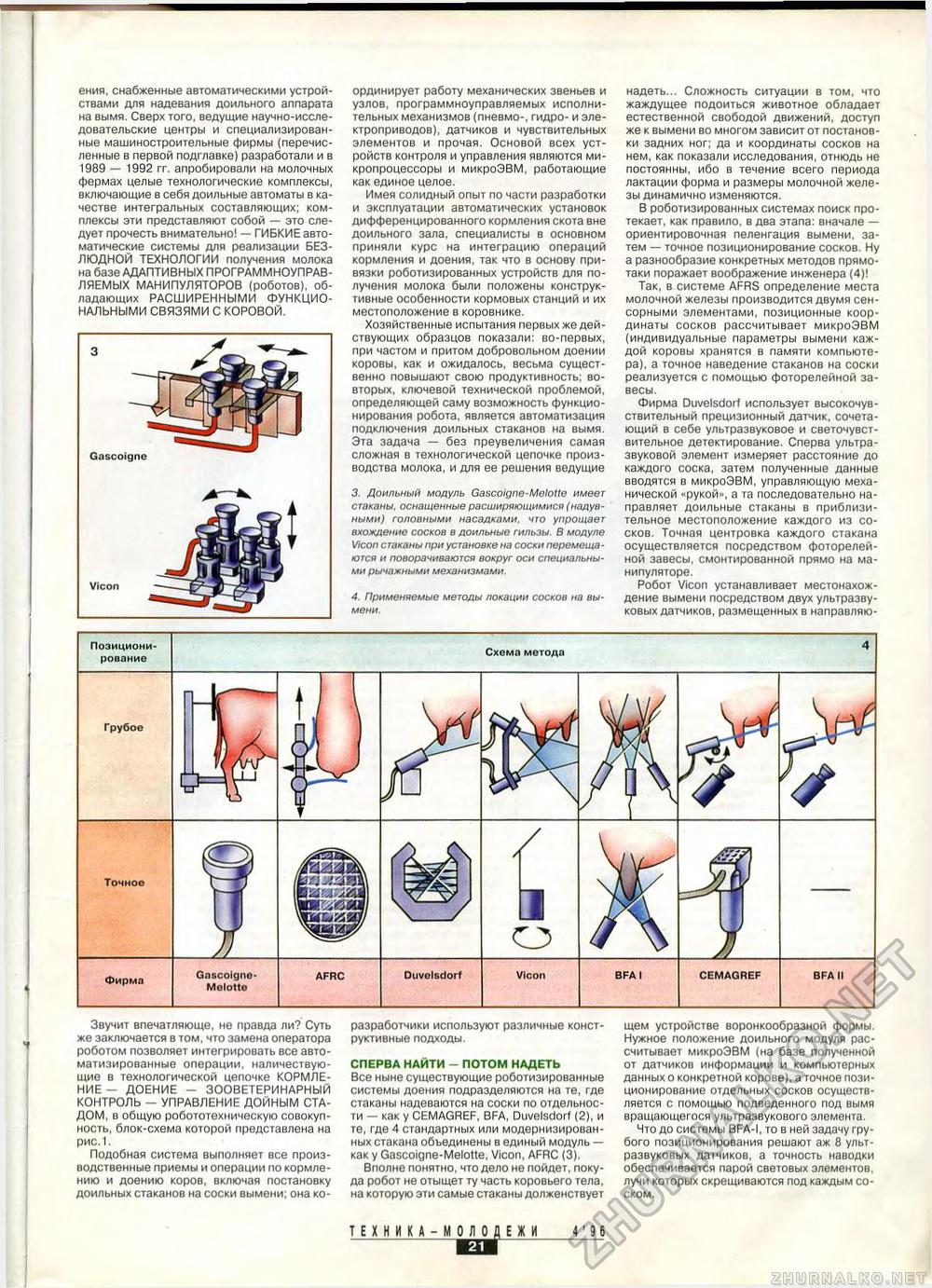
ения, снабженные автоматическими устройствами для надевания доильного аппарата на вымя. Сверх того, ведущие научно-иссле-довательские центры и специализированные машиностроительные фирмы (перечисленные в первой подглавке) разработали и в 1989 — 1992 гг. апробировали на молочных фермах целые технологические комплексы, включающие в себя доильные автоматы честве интегральных составляющих; ком плексы эти представляют собой — это дует прочесть внимательно! — ГИБКИЕ i матические системы для реализации БЕЗЛЮДНОЙ ТЕХНОЛОГИИ получения молока на базе АДАПТИВНЫХ ПРОГРАММНОУПРАВ-ЛЯЕМЫХ МАНИПУЛЯТОРОВ (роботов), обладающих РАСШИРЕННЫМИ ФУНКЦИО НАЛЬНЫМИ СВЯЗЯМИ С КОРОВОЙ. ординирует работу механических звеньев и узлов, программноуправляемых исполнительных механизмов (пневмо-, гидро- и электроприводов), датчиков и чувствительных элементов и прочая. Основой всех устройств контроля и управления являются микропроцессоры и микроэвм, работающие как единое целое. Имея солидный опыт по части разработки и эксплуатации автоматических установок дифференцированного кормления скота вне доильного зала, специалисты в основном приняли курс на интеграцию операций кормления и доения, так что в основу привязки роботизированных устройств для получения молока были положены конструктивные особенности кормовых станций и их местоположение в коровнике. Хозяйственные испытания первых же действующих образцов показали: во-первых, при частом и притом добровольном доении коровы, как и ожидалось, весьма существенно повышают свою продуктивность; во-вторых, ключевой технической проблемой, определяющей саму возможность функционирования робота, является автоматизация подключения доильных стаканов на вымя. Эта задача — без преувеличения самая сложная в технологической цепочке производства молока, и для ее решения ведущие 3. Доильный модуль Gascoigne-Melotte имеет :я(надув-) упрощает в доильные гильзы. В модуле /icon стаканы при установке на с отся и поворачиваются вокруг < ии рычажными механизмами. i. Применяемые методы локацi ными) надеть... Сложность ситуации в том, что жаждущее подоиться животное обладает естественной свободой движений, доступ же к вымени во многом зависит от постановки задних ног; да и координаты сосков на нем, как показали исследования, отнюдь не постоянны, ибо в течение всего периода лактации форма и размеры молочной железы динамично изменяются. В роботизированных системах поиск протекает, как правило, в два этапа: вначале — ориентировочная пеленгация вымени, затем — точное позиционирование сосков. Н а разнообразие конкретных методов прямо таки поражает воображение инженера (4)! Так, в системе AFRS определение места молочной железы производится двумя сорными элементами, позиционные координаты сосков рассчитывает микроэвм (индивидуальные параметры вымени каждой коровы хранятся в памяти комш ра), а точное наведение стаканов на соски реализуется с помощью фоторелейной завесы. Фирма Duvelsdorf использует еысокочув ствительный прецизионный датчик, со ющий в себе ультразвуковое и светочувст вительное детектирование. Сперва ультразвуковой элемент измеряет расстояние до каждого соска, затем полученные данные вводятся в микроэвм, управляющую механической «рукой», а та последовательно на правляет доильные стаканы в приблизи тельное местоположение каждого и: сков. Точная центровка каждого стакана осуществляется посредством фоторелейной завесы, смонтированной прямо на ма нипуляторе. Робот Vicon устанавливает местонахож дение вымени посредством двух ультразву ковых датчиков, размещенных в направляю u I о Звучит впечатляюще, не правда ли? Суть же заключается в том, что замена оператора роботом позволяет интегрировать все автоматизированные операции, наличествующие в технологической цепочке КОРМЛЕНИЕ - ДОЕНИЕ - ЗООВЕТЕРИНАРНЫЙ КОНТРОЛЬ — УПРАВЛЕНИЕ ДОЙНЫМ СТАДОМ, в общую робототехническую совокупность, блок-схема которой представлена на рис.1. Подобная система выполняет все производственные приемы и операции по кормлению и доению коров, включая постановку разработчики используют различные конструктивные подходы. СПЕРВА НАЙТИ - ПОТОМ НАДЕТЬ Все ныне существующие роботизированные системы доения подразделяются на те, где стаканы надеваются на соски по отдельности - как у CEMAGREF, BFA, Duvelsdorf (2), и те, где 4 стандартных или модернизированных стакана объединены в единый модуль — как у Gascoigne-Melotte, Vicon, AFRC (3). Вполне понятно, что дело не пойдет, покуда робот не отыщет ту часть коровьего тела, на которую эти самые стаканы долженствует щем устройстве воронкообразной формы. Нужное положение доильного модуля рассчитывает микроЭВМ (на базе полученной от датчиков информации и компьютерных данных о конкретной корове), а точное позиционирование отдельных сосков осуществляется с помощью подведенного под вымя вращающегося ультразвукового элемента. Что до системы BFA-I, то в ней задачу грубого позиционирования решают аж 8 ультразвуковых датчиков, а точность наводки обеспечивается парой световых элементов, лучи которых скрещиваются под каждым со- Т Е X Н И К А - М ^OJ ЕЖИ 4' 9 6 |








