Юный техник - для умелых рук 1978-12, страница 2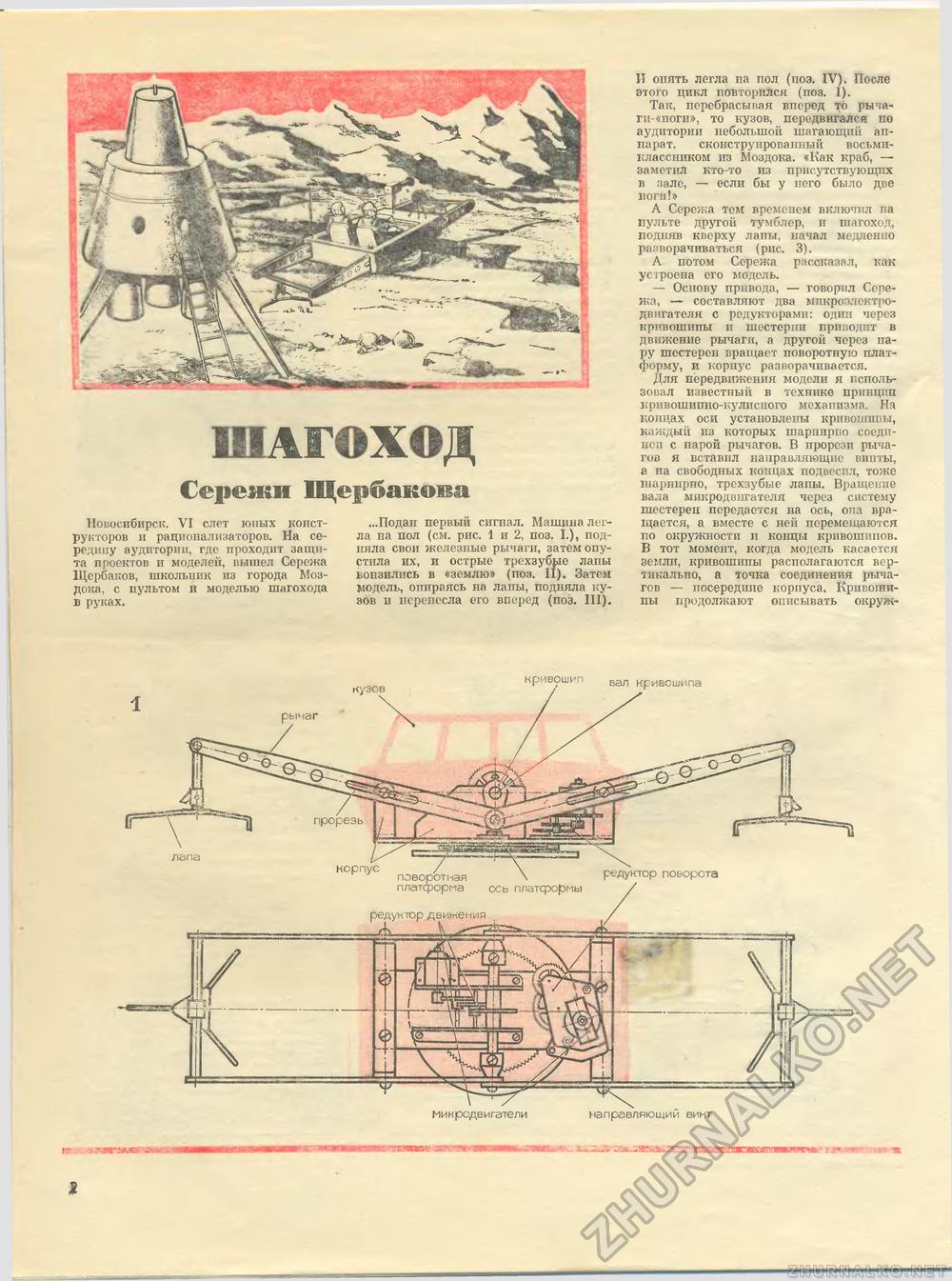
Новосибирск. VI слет юных конструкторов и рационализаторов. На середину аудитории, где проходит защита проектов и моделей, вышел Сережа Щербаков, школьник из города Моздока, с пультом и моделью шагохода в руках. ...Подан первый сигнал. Машина легла на пол (см. рис. 1 и 2, поз. I.), подняла свои железные рычаги, затем опустила их, и острые трехзубое лапы вонзились в «землю» (поз. II). Затем Модель, опираясь на лапы, подняла кузов и перенесла его вперед (поз. III). И опять легла на пол. (поз. IV). После этого цикл повторился (поз. I). Так, перебрасывая вперед то рыча* ги-«ноги», то кузов, передвигался по аудитории небольшой шагающий аппарат. сконструированный восьмиклассником из Моздока. «Как краб, — заметил кто-то из присутствующих в зале, — если бы у него было две ноги!» А Сережа тем временем включил на пульте другой тумблер, и шагоход, подняв кверху лапы, начал медленно разворачиваться (рис. 3). А потом Сережа рассказал, как устроена его модель. — Основу привода, — говорил Сережа, — составляют два мпкроэлектро-двигателя с редукторами: один через кривошипы и шестерни приводит в движение рычаги, а другой через пару шестерен вращает поворотную платформу, и корпус разворачивается. Для передвижения модели я использовал известный в технике принцип кривошипно-кулисиого механизма. На концах оси установлены кривошнпы, каждый из которых шарнирпо соединен с парой рычагов. В прорези рычагов я вставил направляющие винты, а па свободных концах подвесил, тоже шарнирно, трехзубые лапы. Вращение вала микродвигателя через систему шестерен передается на ось, она вращается, а вместе с ней перемещаются по окружности и концы кривошипов. В тот момент, когда модель касается земли, кривошипы располагаются вертикально, а точка соединения рычагов — посередине корпуса. Кривошипы продолжают описывать окруж- микродвигатели направляющим винт кривошип вал кривошипа лапа корпус редуктор поворота ось платформы ft. .«■■■нмшшт' тжяялШ1 вши ^^жагмж^^газваякм^шюивади-'у ■ ч ж |






