Юный техник - для умелых рук 1978-12, страница 4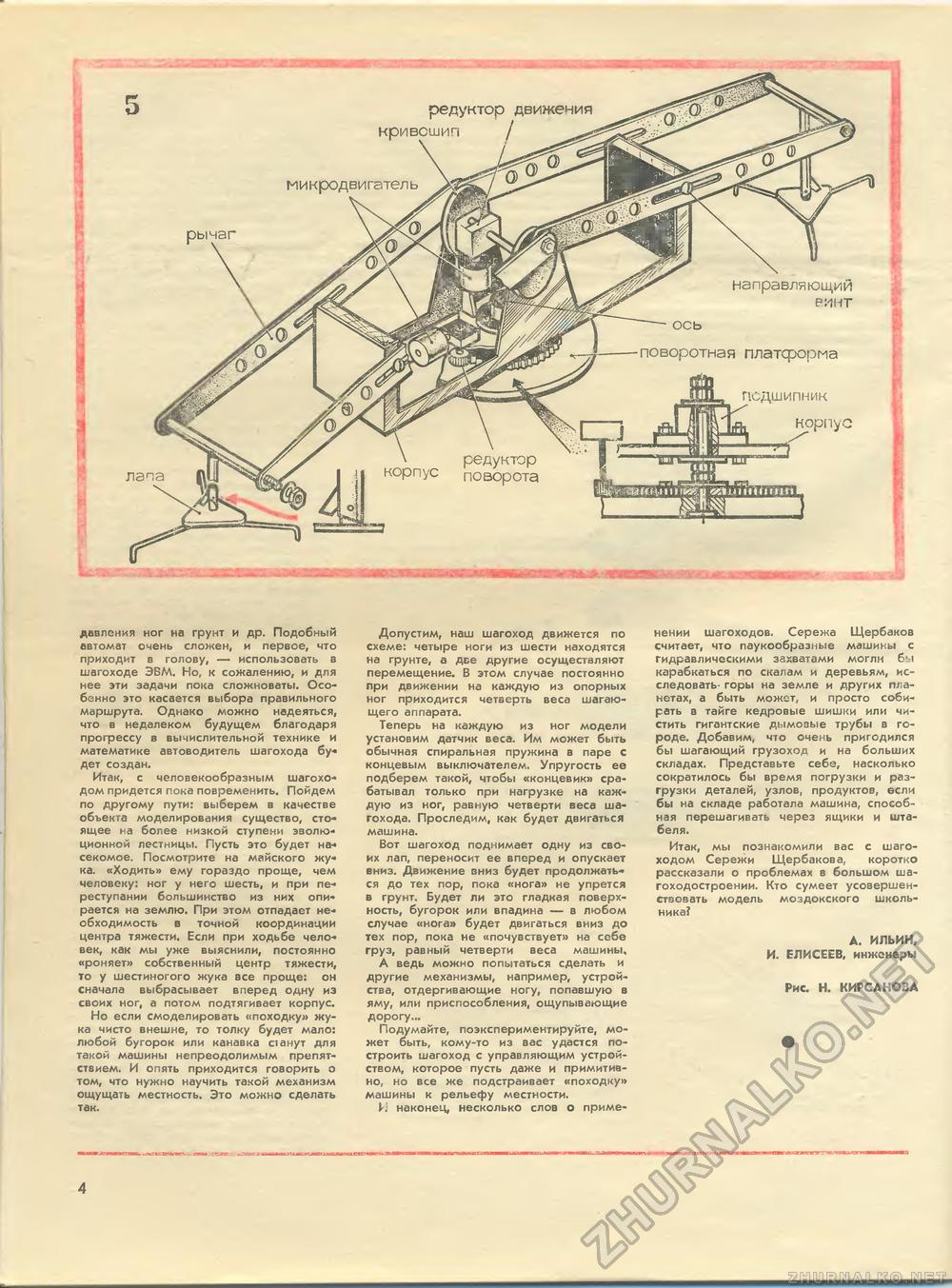
зшпн дьвгения ног на грунт и др. Подобный аптомзт очень сложен, и .первое, что приходит в голову, — использовать в шагоходе ЭРМ. Но, к сожелению, и дня нее эти задачи пока сложноваты. Особенно это касается выбора правильного маршрута. Однако можно надеяться, что в недалеком будущем блегодгря прогрессу в вычислительной технике и математике автовоцитель шагохода бу-дет создан. Итак, с человекообразным шагохо-дом придется пока повременить. Пойдем по другом/ пути: выберем в качестге обьекта моделирования существо, сто» ящее на более низкой ступени эволюционной лестницы. Пусть это б/дет насекомое Посмотрите на майского жука. «Ходить» ему гораздо проще, чем человеку: ног у него шесть, и при пе-реступании большинство из них опирается на землю. При этом отпадает необходимость в точной координации центра тяжести. Если при ходьбе человек, как мы уже выяснили, постоянно «ронгет» собственный центр тяжести, то у шестиногого жука все проще: он сначала выбрасывает вперед одну из своих ног, а потом подтягивает корпус. Но если смоделировать «похсдку» жука чисто внешне, то толку б/дет мало: любой бугорок или канавка станут для такой машины непреодолимым препятствием. И опять приходится говорить о том, что нужно научить такой механизм ощущать местность. Это можно сделать так. Допустим, наш шагоход движется по схеме: четыре ноги из шести находятся на грунте, а две дру1ие осуществляют перемещение. В этом случае постоянно при движении на кьждую из опорных ног приходится четверть веса шагающего аппарата. Теперь на каждую из ног модели установим датчик веса. Им может быть обычная спиральная пружина в паре с концевым выключателем. Упругость ее подберем такой, чтобы «концевик» срабатывал только при нагрузке на каждую из йог, равную четверти веса шагохода. Проследим, как будет двигаться машина. Вот шагоход поднимает одн/ из своих лап, переносит ее вперед и опускает вниз. Движение чниз будет продолжаться до тех пор, пока «нога» ни упрется в грунт. Будет ли это гладкая поверхность, бугорок или впадина — в любом случае «нога» будет двигаться вниз до тех пор, пока не «почувствует» на себе груз, равный четверти веса машины, А ведь можко попытаться сделать и другие механизмы, например, устройства, отдергивающие ногу, попавшую в яму, или приспособления, ощупывающие дорогу... Подумайте, поэкспериментируйте, может ыть, кому-то из вас удастся построить шагоход с управляющим устройством, которое пусть даже и примитивно, но все же подстраивает «походку» машины к рельефу местности. М наконец, несколько слов о приме нении шагсходов. Сережа Щэрбакоз считает, что паукообразные машины с Гидравлическими зчхватрми могли бм карабкаться по скалам и деревьям, исследовать- горы на земле и других планетах, а быть может, и просто собирать в тайге кедровые шишки или чистить гигантские дымозь.е трубы в городе. Добавим, что очень пригодился бы шагающий грузоход и на больших складах. Преде га ьте себе, насколько сократилось 6oi время погрузки и разгрузки деталей, узлов, продуктов, рслч бы на складе работала машина, способная перешагивать через ящики и штабеля. Итак, мы познакомили вас с шаго-ходзм Серзжи Щербакова, коротко рассказали о проблемах в большом ше-гоходостроении. Кто сумеет усовершенствовать модель моздокского школьника? A. HiTът, И. FJlKCtE3, инженеры Рис. К. КИРСАНОВА 4 |








