Юный техник - для умелых рук 1989-02, страница 15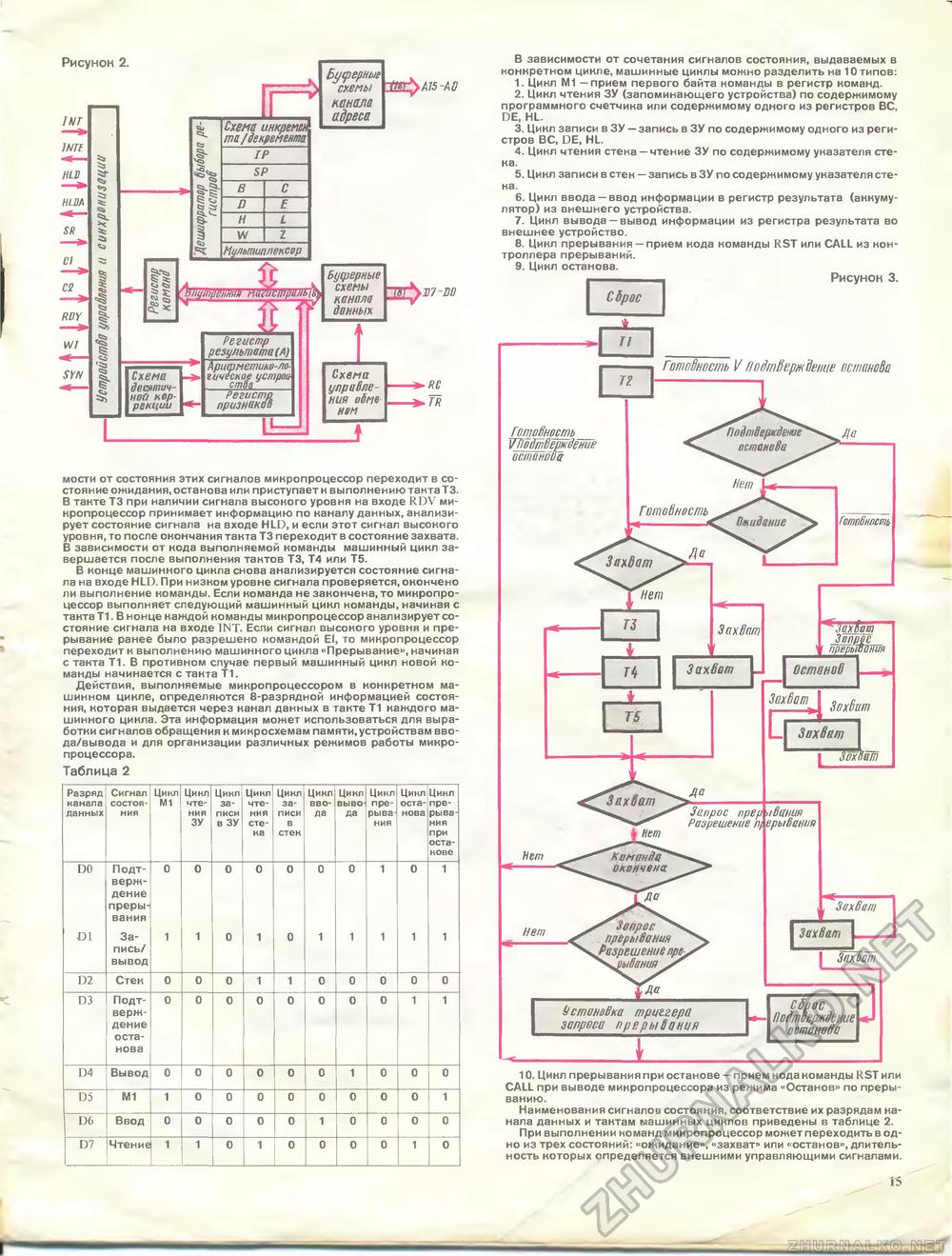
Рисунок 2. мости от состояния этих сигналов микропроцессор переходит в со-тоянм жидания, останова или приступает к выполнению тантаТЗ. В такте ТЗ при наличии сигнала высокого уровня на входе RDV микропроцессор принимает информацию по каналу данных, анализирует состояние сигнала на входе HLD, и если этот сигнал высокого уровня, то после окончания такта ТЗ переходит в сос гояние захвата В зависимости от кода выполняемой команды машинным цлнл завершается после выполнения тантов ТЗ, Т4 или Т5. В конце машин.,ого цикла снова анализируется состояние сигнала на входе HLD. При низнлм уровне сигнала проверяется, окончено ли выполнение команды. Есль юманда не закончена, то микропро-цессс. выполняет следующий машинный цикл номанды, начиная с такта Т1. В нонце каждой г 1ма>■ ды микропроцессор анализирует состояние сигнал на входе INT Если сигнал высокого уровня и прерывание ранее было разрешено командой Ei, то mhi , опроцессор переходит к выполнению машинного цикла «Прерывание», начиная с такта Т1. В противном случае первый машинный цикл новой команды начинается с такта Т1. Действия, выполняемые микропроцессор >м в конкретном машинном цикле, определяются 8-разрядной информацией состояния, которая выдается через канал данных в такте Т1 каждого машинного цикла. Эта информация может использоваться для выработки сигналов обращения к микросхемам памяти, устройствам ввода/вывода и для организации различных режимов работы микропроцессора. Таблица 7. Таблица 7.
В зависимости от сочетания сигналов состояния, выдаваемых в нонкретном цикле, машинные циклы можно рззделить на 10типов: 1. Цикл М1 — прием первого байта номанды в регистр команд. 2. Цикл чтения ЗУ (запоминающего устройства) по содержимому программного счетчика или содержимому одного из регистров ВС, DE, IL. 3. Ц| кл 3! писи в ЗУ — запись в ЗУ по содержимому одного из реги стров t!C, DE, HL. 4. Цикл чтения стена — чтение ЗУ по содержимому указателя стека. 5. Цикл записи в стен — запись в ЗУ по содержимому указателя стека. 6. Цикл ввода —ввод информации в регистр результата (аккумулятор) из внешнего устройства. 7. Цикл вывод а — вывод информации из регистра результата во внешнее устройство. 8. Цикл прерывания —прием кода команды RST или CALL из контроллера прерываний. 9. Цикл останова. Рисунок 3. ГчтоВность V ПодтВер/кдемш останови 10. цикл прерывания при останове — приРм кода команды RSThhh CALL при выводе микропроцессора из режима 'Останов» по преры-ванию. Наименования сигналов сос. ояния. соответствие их разрядам канала данных и тактам машинных циклов приведены в таблице 2. При выполнении » лланд микропроцессор может переходить в одно из трех состояний: «ожидание», «-захват» или -останов», длительность которых определяется внешними управляющими сигналами. |






