Юный техник 1963-03, страница 51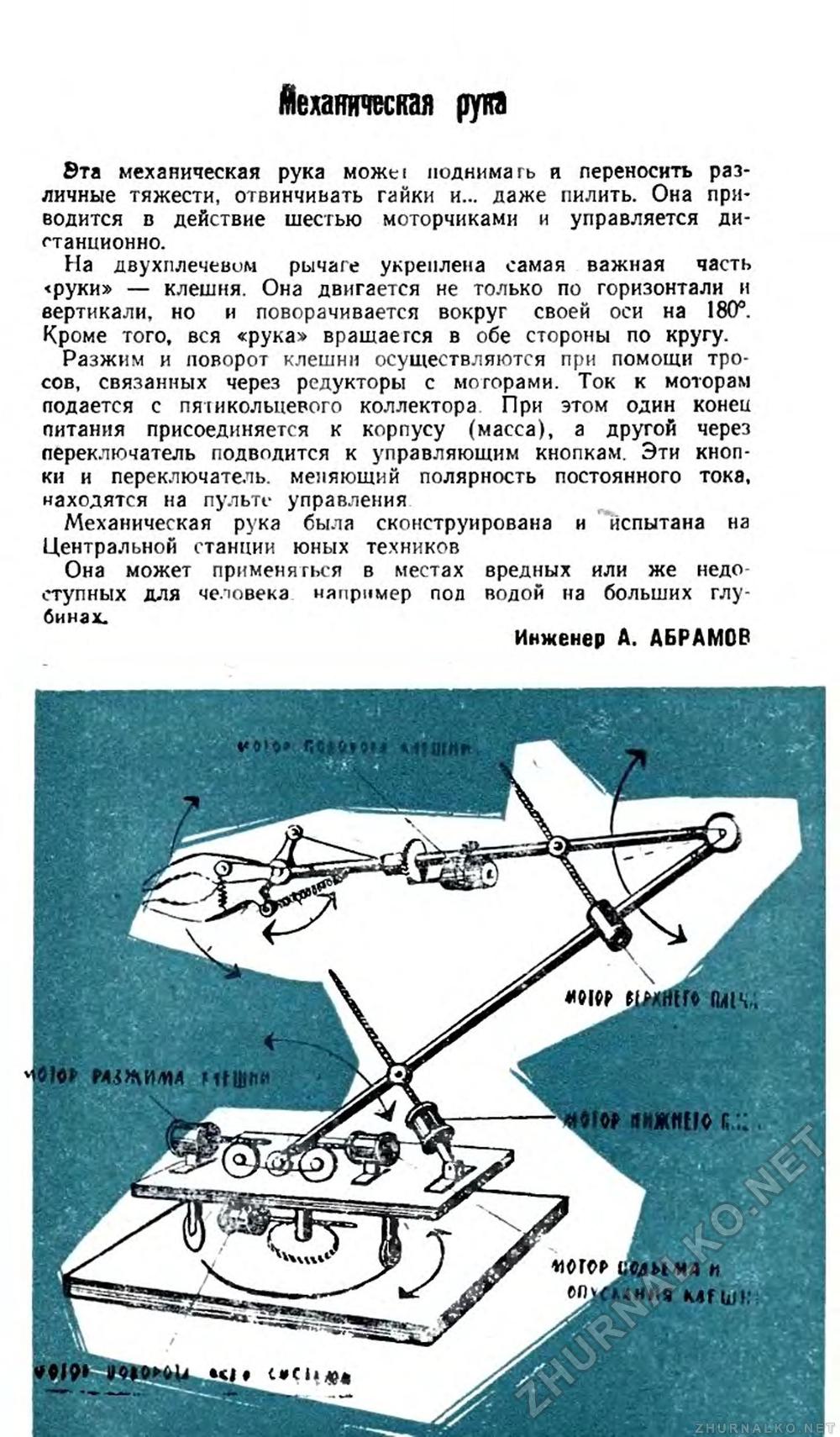
Механическая рука Эта механическая рука можы поднимать и переносить различные тяжести, отвинчивать гайки и... даже пилить. Она приводится в действие шестью моторчиками и управляется дистанционно. На двухплечевим рычаге укреплена самая важная часть <руки» — клешня. Она двигается не только по горизонтали и вертикали, но и поворачивается вокруг своей оси на 180°. Кроме того, вся «рука» вращается в обе стороны по кругу. Разжим и поворот клешни осуществляются при помощи тросов, связанных через редукторы с моторами. Ток к моторам подается с пятикольцевого коллектора При этом один коней питания присоединяется к корпусу (масса), а другой через переключатель подводится к управляющим кнопкам. Эти кнопки и переключатель, меняющий полярность постоянного тока, находятся на пульте управления Механическая рука была сконструирована и испытана на Центральной станции юных техников Она может применяться в местах вредных или же недо ступных для человека например пол водой на больших глу- б и н 3 х. Инженер А. АБРАМОВ •г* SUE MfffiJi* \_ |








