Юный техник 1969-01, страница 40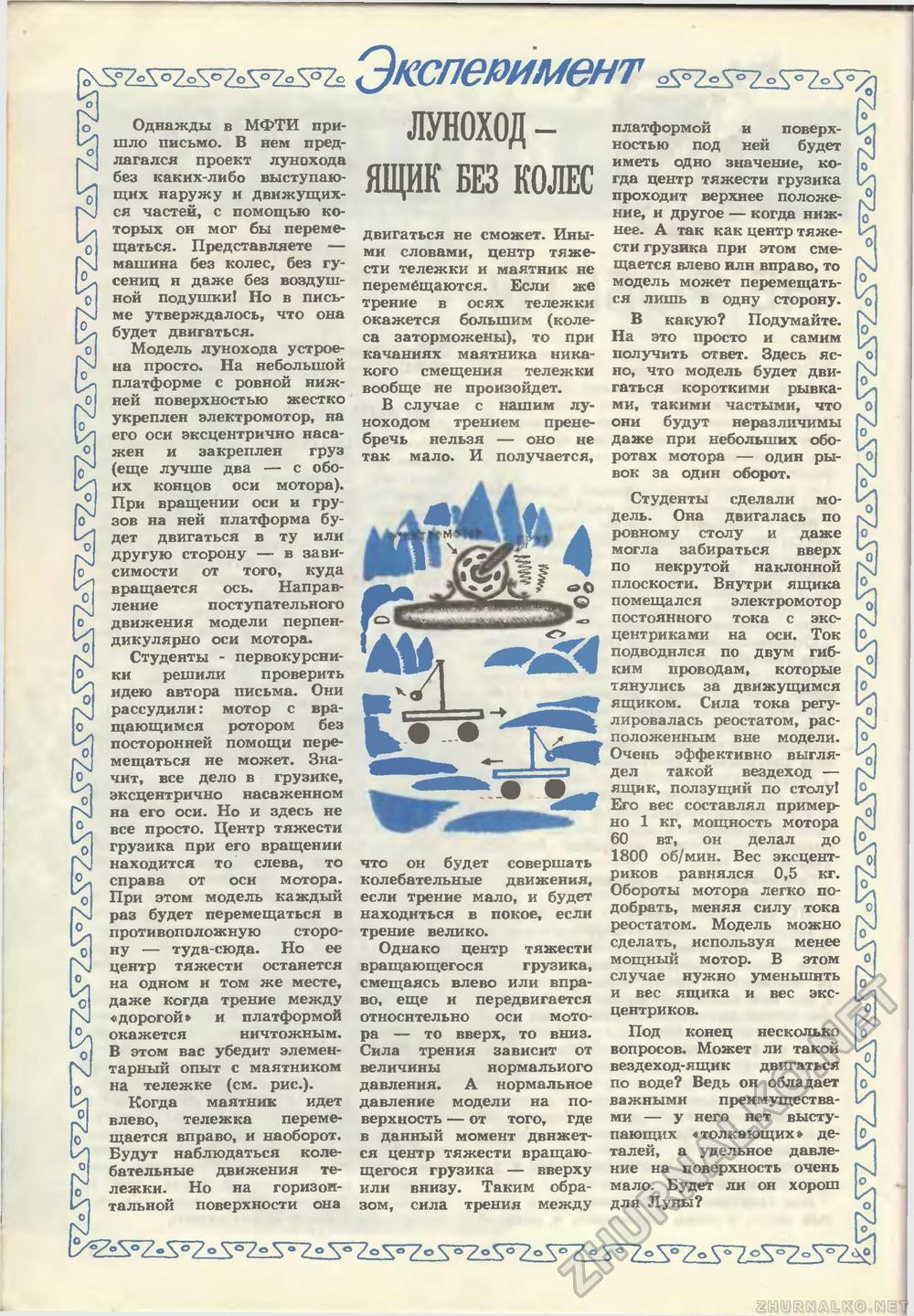
o7o\q ЛЛ°7о \° /о о о К о |о 0| |о о |С о |о Однажды в МФТИ пришло письмо. В нем предлагался проект лунохода без каких-либо выступающих наружу и движущихся частей, с помощью которых он мог бы перемещаться. Представляете — машина без колес, без гусениц н даже без воздушной подушки! Но в письме утверждалось, что она будет двигаться. Модель лунохода устроена просто. На небольшой платформе с ровной нижней поверхностью жестко укреплен электромотор, на его оси эксцентрично насажен и закреплен груз (еще лучше два — с обоих концов оси мотора). При вращении оси и грузов на ней платформа будет двигаться в ту или другую сторону — в зависимости от того, куда вращается ось. Направление поступательного движения модели перпендикулярно оси мотора. Студенты - первокурсники решили проверить идею автора письма. Они рассудили: мотор с вращающимся ротором без посторонней помощи перемещаться не может. Значит, все дело в грузике, эксцентрично насаженном на его оси. Но и здесь не все просто. Центр тяжести грузика при его вращении находится то слева, то справа от оси мотора. При этом модель каждый раз будет перемещаться в противоположную сторону — туда-сюда. Но ее центр тяжести останется на одном и том же месте, даже когда трение между «дорогой» и платформой окажется ничтожным. В этом вас убедит элементарный опыт с маятником на тележке (см. рис.). Когда маятник идет влево, тележка перемещается вправо, и наоборот. Будут наблюдаться колебательные движения тележки. Но на горизонтальной поверхности она Эксперимент ЛУНОХОД -ЯЩИК БЕЗ КОЖ двигаться не сможет. Иными словами, центр тяжести тележки и маятник не перемещаются. Если же трение в осях тележки окажется большим (колеса заторможены), то при качаниях маятника никакого смещения тележки вообще не произойдет. В случае с нашим луноходом трением пренебречь нельзя — оно ие так мало. И получается. что он будет совершать колебательные движения, если трение мало, и будет находиться в покое, если трение велико. Однако центр тяжести вращающегося грузика, смещаясь влево или вправо, еще и передвигается относительно оси мотора — то вверх, то вниз. Сила трения зависит от величины нормального давления. А нормальное давление модели на поверхность — от того, где в данный момент движется центр тяжести вращающегося грузика — вверху или внизу. Таким образом, сила трения между платформой и поверхностью под ней будет иметь одно значение, когда центр тяжести грузика проходит верхнее положение, и другое — когда нижнее. А так как центр тяжести грузика при этом смещается влево илн вправо, то модель может перемещаться лишь в одну сторону. В какую? Подумайте. На это просто и самим получить ответ. Здесь ясно, что модель будет двигаться короткими рывками, такими частыми, что они будут неразличимы даже при небольших оборотах мотора — один рывок за один оборот. Студенты сделали модель. Она двигалась по ровному столу и даже могла забираться вверх по некрутой наклонной плоскости. Внутри ящика помещался электромотор постоянного тока с эксцентриками на оси. Ток подводился по двум гибким проводам, которые тянулись за движущимся ящиком. Сила тока регулировалась реостатом, расположенным вне модели. Очень эффективно выглядел такой вездеход — ящик, ползущий по столу! Его вес составлял примерно 1 кг, мощность мотора 60 вт, он делал до 1800 об/мин. Вес эксцентриков равнялся 0,5 кг. Обороты мотора легко подобрать, меняя силу тока реостатом. Модель можно сделать, используя менее мощный мотор. В этом случае нужно уменьшить и вес ящика и вес эксцентриков. Под конец несколько вопросов. Может ли такой вездеход-ящик двигаться по воде? Ведь он обладает важными преимуществами — у него нет выступающих «толкающих» деталей, а удельное давление на поверхность очень мало. Будет ли он хорош для Луны? о /1 о $ о о ft о о |0 0 [о 01 о о) lo4 of |о of о ю |








