Юный техник 1981-03, страница 60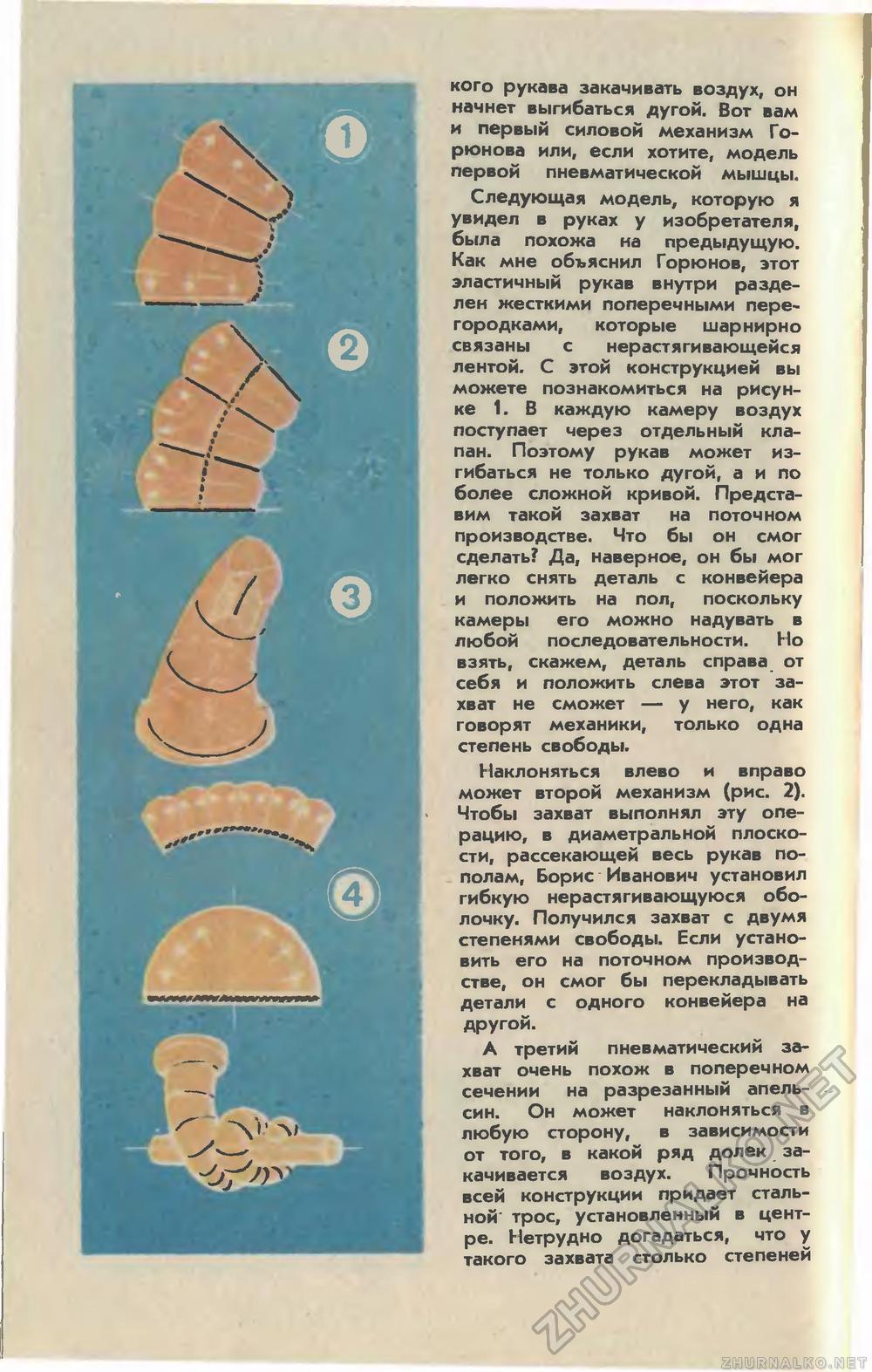
кого рукава закачивать воздух, он начнет выгибаться дугой. Вот вам и первый силовой механизм Го-рюнова или, если хотите, модель первой пневматической мышцы. Следующая модель, которую я увидел в руках у изобретателя, была похожа на предыдущую. Как мне объяснил Горюнов, этот эластичный рукав внутри разделен жесткими поперечными перегородками, которые шарнирно связаны с нерастягивающейся лентой. С этой конструкцией вы можете познакомиться на рисунке 1. В каждую камеру воздух поступает через отдельный клапан. Поэтому рукав может изгибаться не только дугой, а и по более сложной кривой. Представим такой захват на поточном производстве. Что бы он смог сделать? Да, наверное, он бы мог легко снять деталь с конвейера и положить на пол, поскольку камеры его можно надувать в любой последовательности. Но взять, скажем, деталь справа от себя и положить слева этот захват не сможет — у него, как говорят механики, только одна степень свободы. Наклоняться влево и вправо может второй механизм (рис. 2). Чтобы захват выполнял эту операцию, в диаметральной плоскости, рассекающей весь рукав пополам, Борис Иванович установил гибкую нерастягивающуюся оболочку. Получился захват с двумя степенями свободы. Если установить его на поточном производстве, он смог бы перекладывать детали с одного конвейера на другой. А третий пневматический захват очень похож в поперечном сечении на разрезанный апельсин. Он может наклоняться в любую сторону, в зависимости от того, в какой ряд долек закачивается воздух. Прочность всей конструкции придает стальной" трос, установленный в центре. Нетрудно догадаться, что у такого захвата столько степеней |








