Юный техник 1987-09, страница 75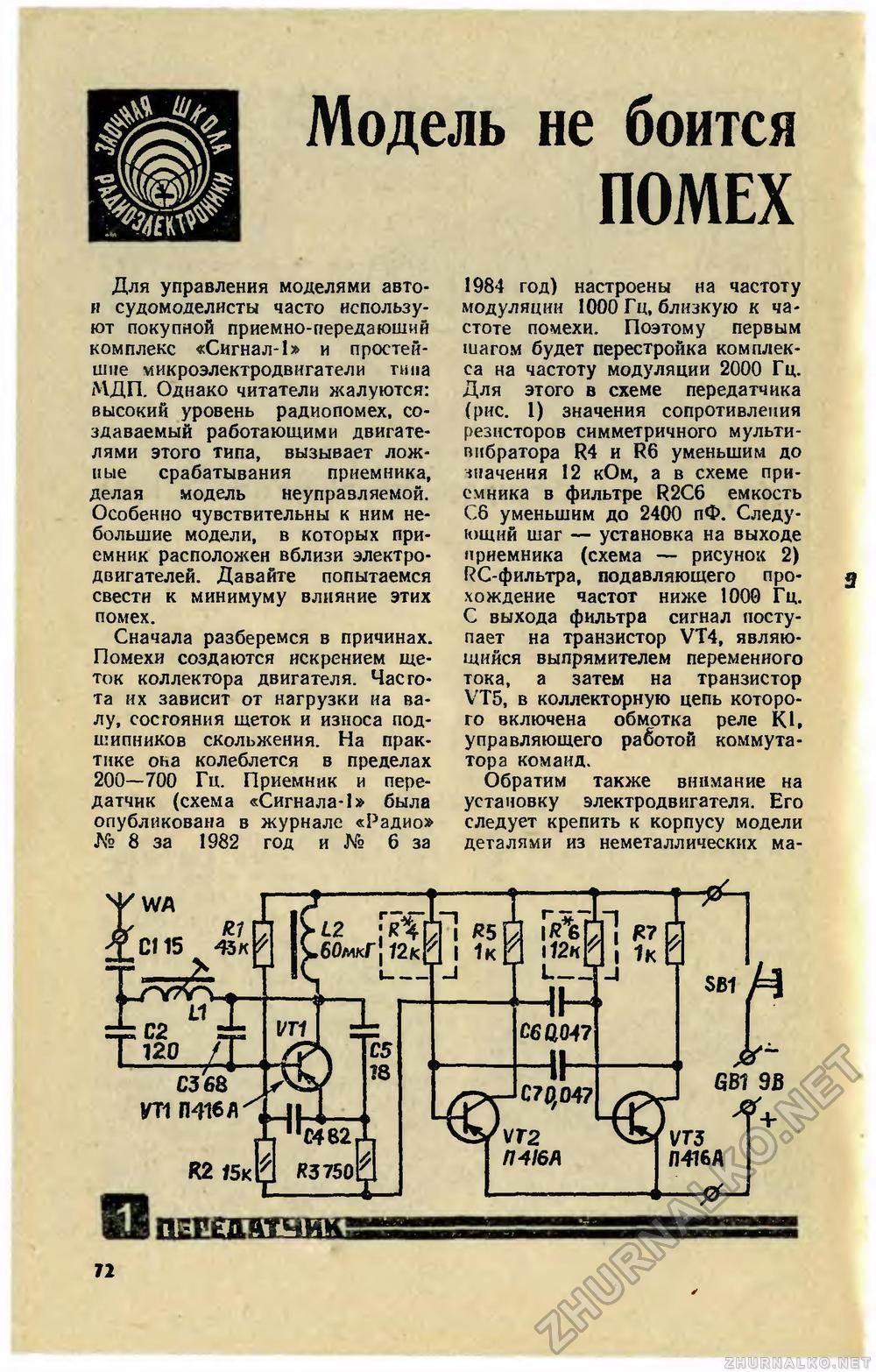
Модель не боится ПОМЕХ Для управления моделями авто-и судомоделисты часто используют покупной приемно-передаюший комплекс «Сигнал-1» и простейшие микроэлектродвигатели типа МДП. Однако читатели жалуются: высокий уровень радиопомех, создаваемый работающими двигателями этого типа, вызывает ложные срабатывания приемника, делая модель неуправляемой. Особенно чувствительны к ним небольшие модели, в которых приемник расположен вблизи электродвигателей. Давайте попытаемся свести к минимуму влияние этих помех. Сначала разберемся в причинах. Помехи создаются искрением щеток коллектора двигателя. Частота их зависит от нагрузки иа валу, состояния щеток и износа подшипников скольжения. На практике ока колеблется в пределах 200—700 Гц. Приемник и передатчик (схема «Сигнала-1» была опубликована в журнале «Радио» № 8 за 1982 год и № 6 за 1984 год) настроены на частоту модуляции 1000 Гц, близкую к частоте помехи. Поэтому первым шагом будет перестройка комплекса на частоту модуляции 2000 Гц. Для этого в схеме передатчика (рис. 1) значения сопротивления резисторов симметричного мультивибратора R4 и R6 уменьшим до значения 12 кОм, а в схеме приемника в фильтре R2C6 емкость С6 уменьшим до 2400 пФ. Следующий шаг — установка на выходе приемника (схема — рисунок 2) RC-фильтра, подавляющего прохождение частот ниже 1000 Гц. С выхода фильтра сигнал поступает на транзистор VT4, являющийся выпрямителем переменного тока, а затем на транзистор VT5, в коллекторную цепь которого включена обмотка реле К1. управляющего работой коммутатора команд. Обратим также внимание на установку электродвигателя. Его следует крепить к корпусу модели деталями из неметаллических ма- 72 |








