Юный техник 2003-12, страница 58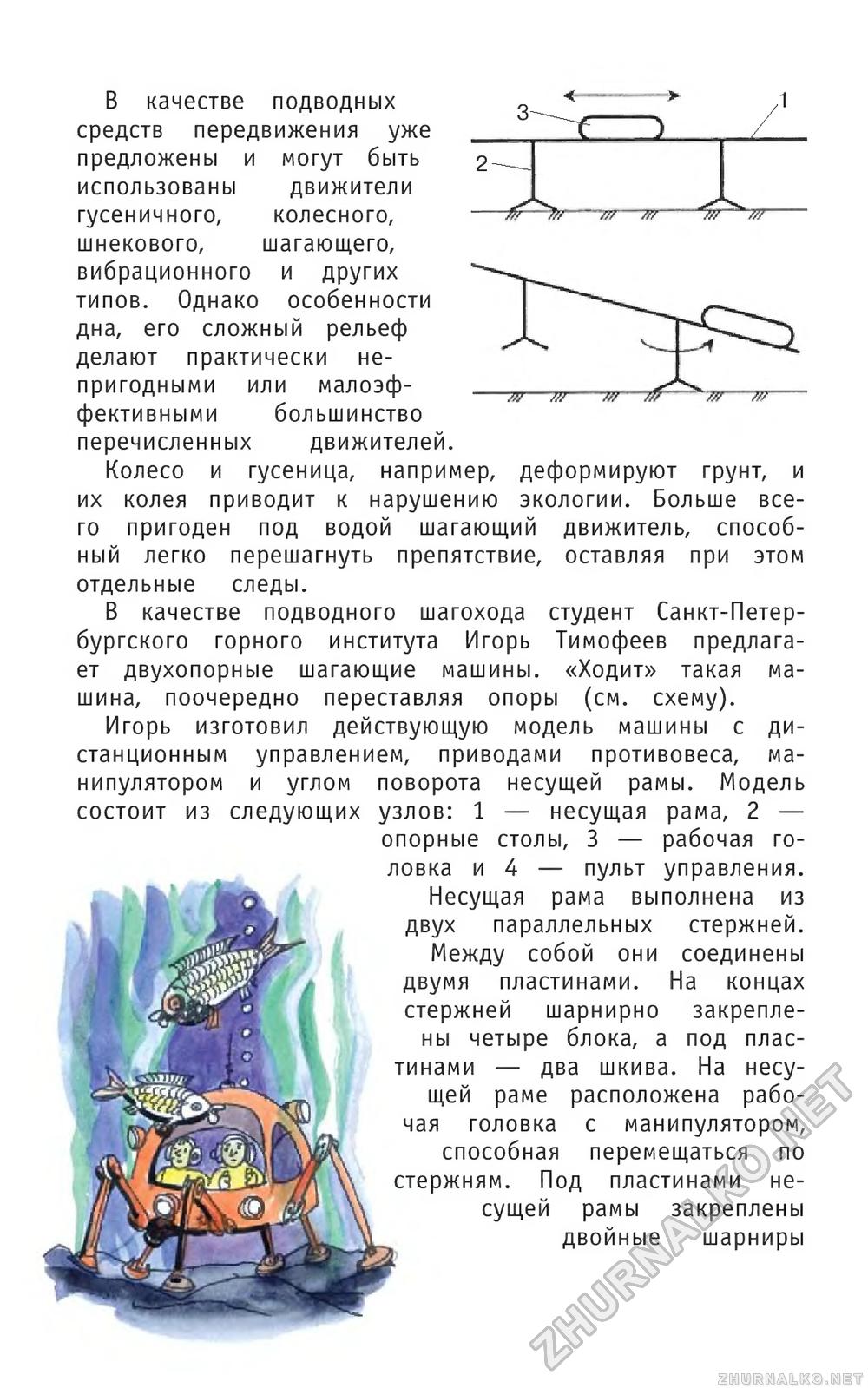
В качестве подводных средств передвижения уже предложены и могут быть использованы движители гусеничного, колесного, шнекового, шагающего, вибрационного и других типов. Однако особенности дна, его сложный рельеф делают практически непригодными или малоэффективными большинство перечисленных движителей. Колесо и гусеница, например, деформируют грунт, и их колея приводит к нарушению экологии. Больше всего пригоден под водой шагающий движитель, способный легко перешагнуть препятствие, оставляя при этом отдельные следы. В качестве подводного шагохода студент Санкт-Петербургского горного института Игорь Тимофеев предлагает двухопорные шагающие машины. «Ходит» такая машина, поочередно переставляя опоры (см. схему). Игорь изготовил действующую модель машины с дистанционным управлением, приводами противовеса, манипулятором и углом поворота несущей рамы. Модель состоит из следующих узлов: 1 — несущая рама, 2 — опорные столы, 3 — рабочая головка и 4 — пульт управления. Несущая рама выполнена из двух параллельных стержней. Между собой они соединены двумя пластинами. На концах стержней шарнирно закреплены четыре блока, а под пластинами — два шкива. На несущей раме расположена рабочая головка с манипулятором, способная перемещаться по стержням. Под пластинами несущей рамы закреплены двойные шарниры |








