Юный техник 2003-12, страница 59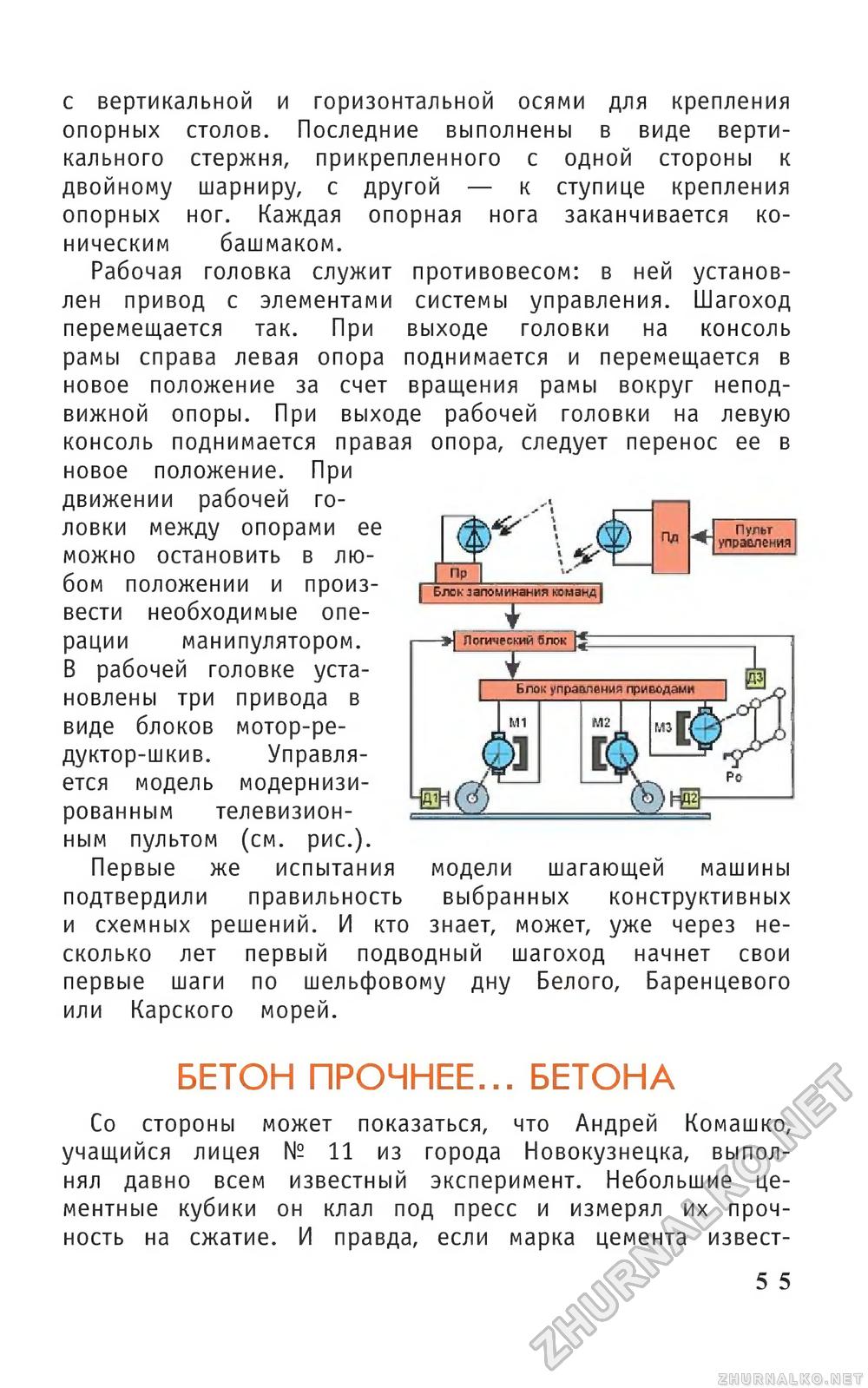
с вертикальном и горизонтальном осями для крепления опорных столов. Последние выполнены в виде вертикального стержня, прикрепленного с одной стороны к двойному шарниру, с другой — к ступице крепления опорных ног. Каждая опорная нога заканчивается коническим башмаком. Рабочая головка служит противовесом: в ней установлен привод с элементами системы управления. Шагоход перемещается так. При выходе головки на консоль рамы справа левая опора поднимается и перемещается в новое положение за счет вращения рамы вокруг неподвижной опоры. При выходе рабочей головки на левую консоль поднимается правая опора, следует перенос ее в новое положение. При движении рабочей головки между опорами ее можно остановить в любом положении и произвести необходимые операции манипулятором. В рабочей головке установлены три привода в виде блоков мотор-ре-дуктор-шкив. Управляется модель модернизированным телевизионным пультом (см. рис.). Первые же испытания модели шагающей машины подтвердили правильность выбранных конструктивных и схемных решений. И кто знает, может, уже через несколько лет первый подводный шагоход начнет свои первые шаги по шельфовому дну Белого, Баренцевого или Карского морей. БЕТОН ПРОЧНЕЕ... БЕТОНА Со стороны может показаться, что Андрей Комашко, учащийся лицея № 11 из города Новокузнецка, выполнял давно всем известный эксперимент. Небольшие цементные кубики он клал под пресс и измерял их прочность на сжатие. И правда, если марка цемента извест Пульт управления fi Блок запоминания кэмэнд Логический блок I Логический блок I
(b) Цц^ (b) Цц^ |
||||||||||||








