Сделай Сам (Знание) 2001-03, страница 119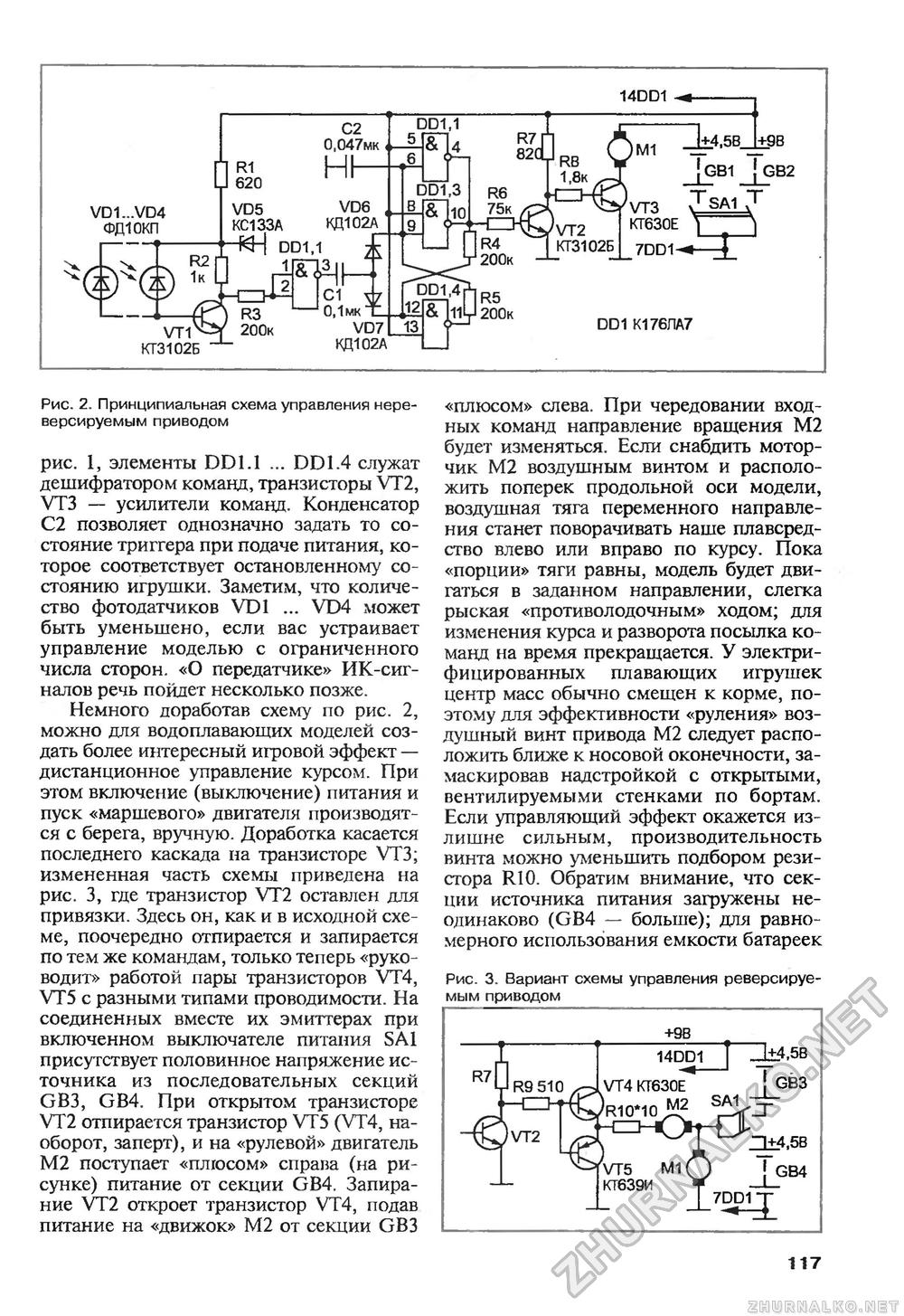
VD1...VD4 ФД10КП О R1 620 VD5 КС133А 43 С2 0,047мк HI— VD6 КД102А DD1.1 VT1 КТ3102Б С1 0,1мкТ1 VD7 КД102А DD1.1 5_ 6 DD1.3 14DD1 DD1.3
□±4 )М1 -±-' -z!r +9В GB1 ! GB2 т« т КГ3102Б VT3 у" SA1 у КТ630Е ) ) 7DD1 DD1 К176ЛА7 Рис. 2. Принципиальная схема управления нере-версируемым приводом рис. 1, элементы DD1.1 ... DDI.4 служат дешифратором команд, транзисторы VT2, VT3 — усилители команд. Конденсатор С2 позволяет однозначно задать то состояние триггера при подаче питания, которое соответствует остановленному состоянию игрушки. Заметим, что количество фотодатчиков VD1 ... VD4 может быть уменьшено, если вас устраивает управление моделью с ограниченного числа сторон. «О передатчике» ИК-сиг-налов речь пойдет несколько позже. Немного доработав схему по рис. 2, можно для водоплавающих моделей создать более интересный игровой эффект — дистанционное управление курсом. При этом включение (выключение) питания и пуск «маршевого» двигателя производятся с берега, вручную. Доработка касается последнего каскада на транзисторе VT3; измененная часть схемы приведена на рис. 3, где транзистор VT2 оставлен для привязки. Здесь он, как и в исходной схеме, поочередно отпирается и запирается по тем же командам, только теперь «руководит» работой пары транзисторов VT4, VT5 с разными типами проводимости. На соединенных вместе их эмиттерах при включенном выключателе питания SA1 присутствует половинное напряжение источника из последовательных секций GB3, GB4. При открытом транзисторе VT2 отпирается транзистор VT5 (VT4, наоборот, заперт), и на «рулевой» двигатель М2 поступает «плюсом» справа (на рисунке) питание от секции GB4. Запирание VT2 откроет транзистор VT4, подав питание на «движок» М2 от секции GB3 «плюсом» слева. При чередовании входных команд направление вращения М2 будет изменяться. Если снабдить моторчик М2 воздушным винтом и расположить поперек продольной оси модели, воздушная тяга переменного направления станет поворачивать наше плавсредство влево или вправо по курсу. Пока «порции» тяги равны, модель будет двигаться в заданном направлении, слегка рыская «противолодочным» ходом; для изменения курса и разворота посылка команд на время прекращается. У электрифицированных плавающих игрушек центр масс обычно смещен к корме, поэтому для эффективности «руления» воздушный винт привода М2 следует расположить ближе к носовой оконечности, замаскировав надстройкой с открытыми, вентилируемыми стенками по бортам Если управляющий эффект окажется излишне сильным, производительность винта можно уменьшить подбором резистора R10. Обратим внимание, что секции источника питания загружены неодинаково (GB4 — больше); для равно мерного использования емкости батареек 117 |








