Техника - молодёжи 1978-12, страница 22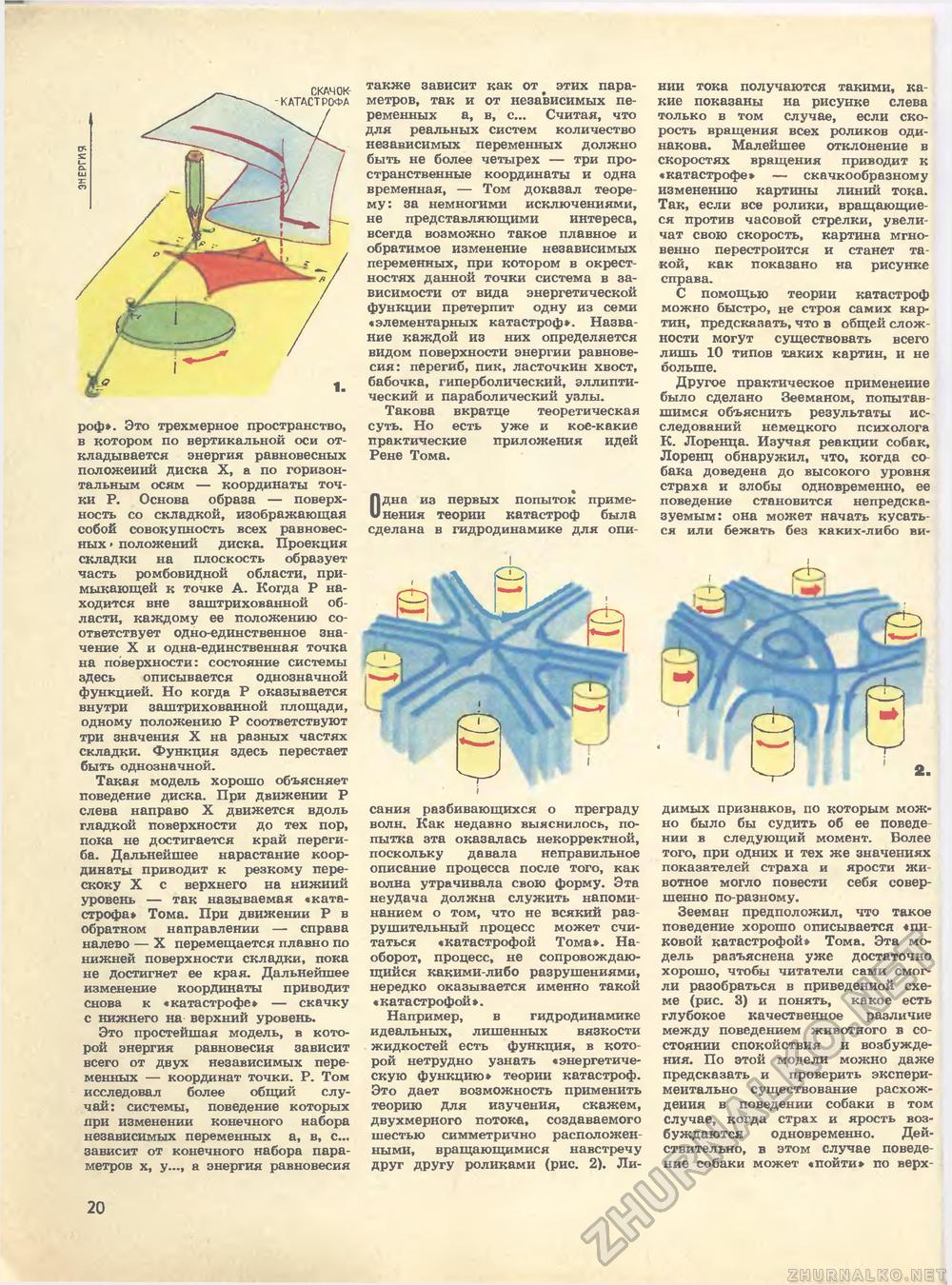
роф». Это трехмерное пространство, в котором по вертикальной оси откладывается энергия равновесных положений диска X, а по горизонтальным осям — координаты точки Р. Основа образа — поверхность со складкой, изображающая собой совокупность всех равновесных > положений диска. Проекция складки на плоскость образует часть ромбовидной области, примыкающей к точке А. Когда Р находится вне заштрихованной области, каждому ее положению соответствует одно-единственное значение X и одна-единственная точка на поверхности: состояние системы здесь описывается однозначной функцией. Но когда Р оказывается внутри заштрихованной площади, одному положению Р соответствуют три значения X на разных частях складки. Функция здесь перестает быть однозначной. Такая модель хорошо объясняет поведение диска. При движении Р слева направо X движется вдоль гладкой поверхности до тех пор, пока не достигается край перегиба. Дальнейшее нарастание координаты приводит к резкому перескоку X с верхнего на нижний уровень — так называемая «катастрофа» Тома. При движении Р в обратном направлении — справа налево — X перемещается плавно по нижней поверхности складки, пока не Достигнет ее края. Дальнейшее изменение координаты приводит снова к «катастрофе» — скачку с нижнего на верхний уровень. Это простейшая модель, в которой энергия равновесия зависит всего от двух независимых переменных — координат точки. Р. Том исследовал более общий случай: системы, поведение которых при изменении конечного набора независимых переменных а, в, с... зависит от конечного набора параметров х, у..., а энергия равновесия также зависит как от ^ этих параметров, так и от независимых переменных а, в, с... Считая, что для реальных систем количество независимых переменных должно быть не более четырех — три пространственные координаты и одна временная, — Том доказал теорему: за немногими исключениями, не представляющими интереса, всегда возможно такое плавное и обратимое изменение независимых переменных, при котором в окрестностях данной точки система в зависимости от вида энергетической функции претерпит одну из семи «элементарных катастроф». Название каждой из них определяется видом поверхности энергии равновесия: перегиб, пик, ласточкин хвост, бабочка, гиперболический, эллиптический и параболический узлы. Такова вкратце теоретическая суть. Но есть уже и кое-какие практические приложения идей Рене Тома. Одна из первых попыток применения теории катастроф была сделана в гидродинамике для опи- 1 сания разбивающихся о преграду волн. Как недавно выяснилось, попытка зта оказалась некорректной, поскольку давала неправильное описание процесса после того, как волна утрачивала свою форму. Эта неудача должна служить напоминанием о том, что не всякий разрушительный процесс может считаться «катастрофой Тома». Наоборот, процесс, не сопровождающийся какими-либо разрушениями, нередко оказывается именно такой «катастрофой». Например, в гидродинамике идеальных, лишенных вязкости жидкостей есть функция, в кото рой нетрудно узнать «энергетическую функцию» теории катастроф. Это дает возможность применить теорию для изучения, скажем, двухмерного потока, создаваемого шестью симметрично расположенными, вращающимися навстречу друг другу роликами (рис. 2). Ли нии тока получаются такими, какие показаны на рисунке слева только в том случае, если скорость вращения всех роликов одинакова. Малейшее отклонение в скоростях вращения приводит к «катастрофе» — скачкообразному изменению картины линий тока. Так, если все ролики, вращающиеся против часовой стрелки, увеличат свою скорость, картина мгновенно перестроится и станет такой, как показано на рисунке справа. С помощью теории катастроф можно быстро, не строя самих картин, предсказать, что в общей сложности могут существовать всего лишь 10 типов таких картин, и не больше. Другое практическое применение было сделано Зееманом, попытавшимся объяснить результаты исследований немецкого психолога К. Лоренца. Изучая реакции собак, Лоренц обнаружил, что, когда собака доведена до высокого уровня страха и злобы одновременно, ее поведение становится непредсказуемым: она может начать кусаться или бежать без каких-либо ви- I димых признаков, по которым можно было бы судить об ее поведении в следующий момент. Более того, при одних и тех же значениях показателей страха и ярости животное могло повести себя совершенно по-разному. Зееман предположил, что такое поведение хорошо описывается «пиковой катастрофой» Тома. Эта модель разъяснена уже достаточно хорошо, чтобы читатели сами смогли разобраться в приведенной схеме (рис. 3) и понять, какое есть глубокое качественное различие между поведением животного в состоянии спокойствия и возбуждения. По этой модели можно даже предсказать и проверить экспериментально существование расхождения в поведении собаки в том случае, когда страх и ярость возбуждаются одновременно. Действительно, в этом случае поведение собаки может «пойти» по верх- 20 |








