Техника - молодёжи 1994-01, страница 6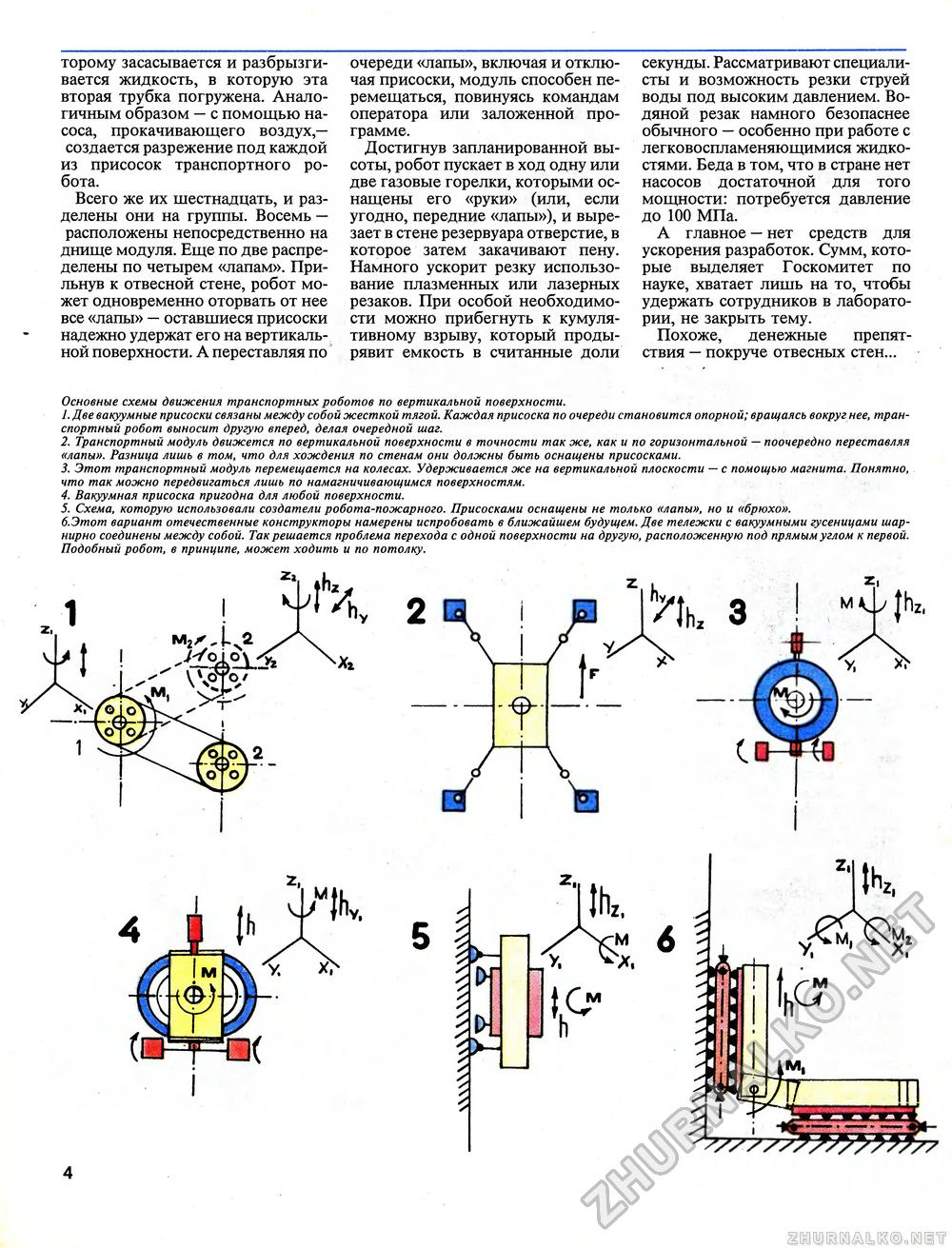
торому засасывается и разбрызгивается жидкость, в которую эта вторая трубка погружена. Аналогичным образом — с помощью насоса, прокачивающего воздух,— создается разрежение под каждой из присосок транспортного робота. Всего же их шестнадцать, и разделены они на группы. Восемь — расположены непосредственно на днище модуля. Еще по две распределены по четырем «лапам». Прильнув к отвесной стене, робот может одновременно оторвать от нее все «лапы» — оставшиеся присоски надежно удержат его на вертикальной поверхности. А переставляя по очереди «лапы», включая и отключая присоски, модуль способен перемещаться, повинуясь командам оператора или заложенной программе. Достигнув запланированной высоты, робот пускает в ход одну или две газовые горелки, которыми оснащены его «руки» (или, если угодно, передние «лапы»), и вырезает в стене резервуара отверстие, в которое затем закачивают пену. Намного ускорит резку использование плазменных или лазерных резаков. При особой необходимости можно прибегнуть к кумулятивному взрыву, который продырявит емкость в считанные доли секунды. Рассматривают специалисты и возможность резки струей воды под высоким давлением. Водяной резак намного безопаснее обычного — особенно при работе с легковоспламеняющимися жидкостями. Беда в том, что в стране нет насосов достаточной для того мощности: потребуется давление до 100 МПа. А главное — нет средств для ускорения разработок. Сумм, которые выделяет Госкомитет по науке, хватает лишь на то, чтобы удержать сотрудников в лаборатории, не закрыть тему. Похоже, денежные препятствия — покруче отвесных стен... Основные схемы движения транспортных роботов по вертикальной поверхности. 1. Две вакуумные присоски связаны между собой жесткой тягой. Каждая присоска по очереди становится опорной; вращаясь вокруг нее, транспортный робот выносит другую вперед, делая очередной шаг. 2. Транспортный модуль движется по вертикальной поверхности в точности так же, как и по горизонтальной — поочередно переставляя «лапы». Разница лишь в том, что для хождения по стенам они должны быть оснащены присосками. 3. Этот транспортный модуль перемещается на колесах. Удерживается же на вертикальной плоскости — с помощью магнита. Понятно, что так можно передвигаться лишь по намагничивающимся поверхностям. 4. Вакуумная присоска пригодна для любой поверхности. 5. Схема, которую использовали создатели робота-пожарного. Присосками оснащены не только «лапы», но и «брюхо». б.Этот вариант отечественные конструкторы намерены испробовать в ближайшем будущем. Две тележки с вакуумными гусеницами шар-нирно соединены между собой. Так решается проблема перехода с одной поверхности на другую, расположенную под прямым углом к первой. Подобный робот, в принципе, может ходить и по потолку. 21 h* У4*!»' KJ гл Ж з I | ^ ■ 2, У. х, 5 I > D- Г 2. Jhz. <4 6 t.CM п Z, К 4 |








