Юный техник 1977-02, страница 77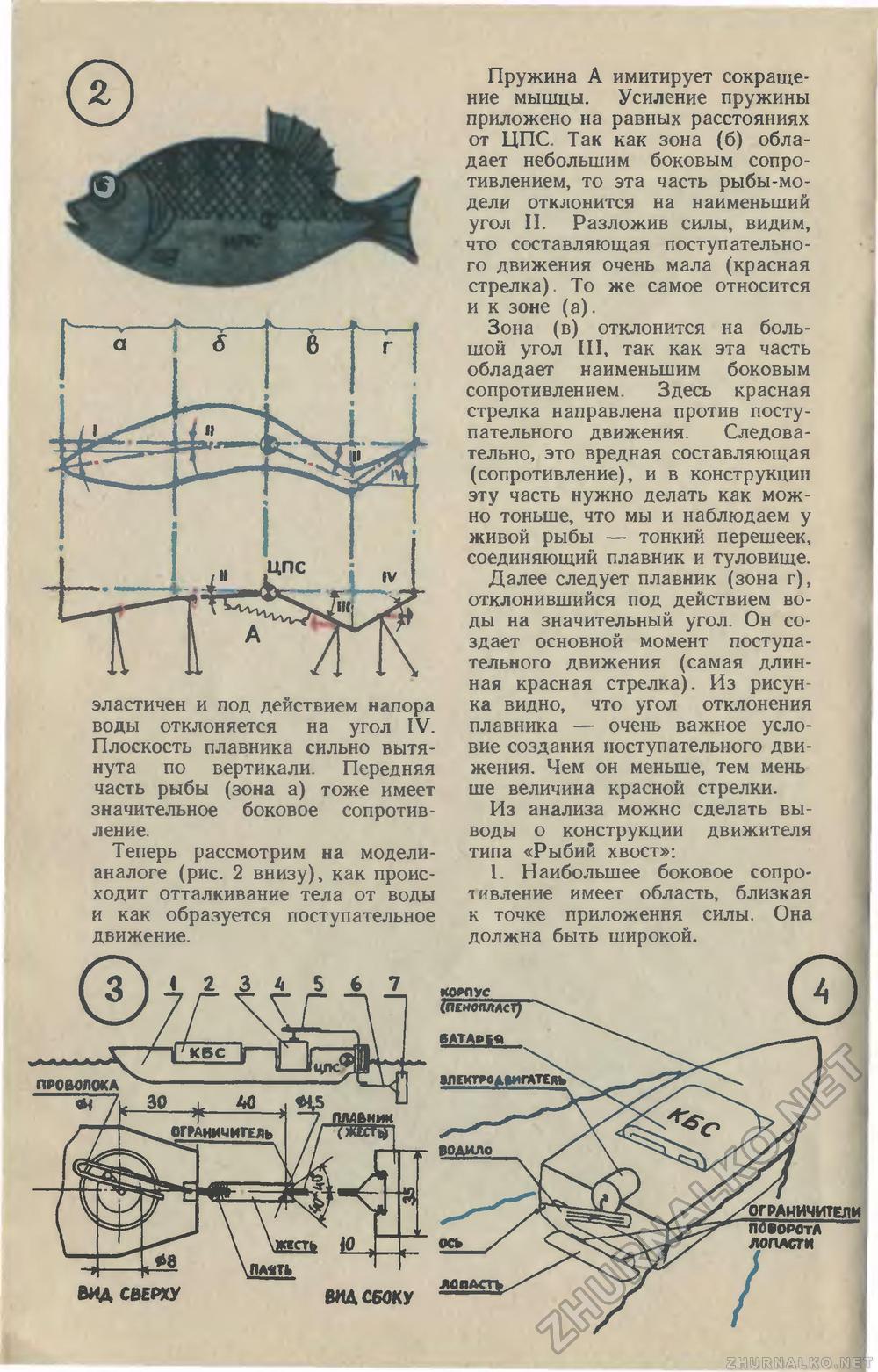
эластичен и под действием напора воды отклоняется на угол IV. Плоскость плавника сильно вытянута по вертикали. Передняя часть рыбы (зона а) тоже имеет значительное боковое сопротивление. Теперь рассмотрим на модели-аналоге (рис. 2 внизу), как происходит отталкивание тела от воды и как образуется поступательное движение. Пружина А имитирует сокращение мышцы. Усиление пружины приложено на равных расстояниях от ЦПС. Так как зона (б) обладает небольшим боковым сопротивлением, то эта часть рыбы-модели отклонится на наименьший угол II. Разложив силы, видим, что составляющая поступательного движения очень мала (красная стрелка). То же самое относится и к зоне (а). Зона (в) отклонится на большой угол III, так как эта часть обладает наименьшим боковым сопротивлением. Здесь красная стрелка направлена против поступательного движения. Следовательно, это вредная составляющая (сопротивление), и в конструкции эту часть нужно делать как можно тоньше, что мы и наблюдаем у живой рыбы — тонкий перешеек, соединяющий плавник и туловище. Далее следует плавник (зона г), отклонившийся под действием воды на значительный угол. Он создает основной момент поступательного движения (самая длинная красная стрелка). Из рисунка видно, что угол отклонения плавника — очень важное условие создания поступательного движения. Чем он меньше, тем мень ше величина красной стрелки. Из анализа можно сделать выводы о конструкции движителя типа «Рыбий хвост»: 1. Наибольшее боковое сопротивление имеет область, близкая к точке приложения силы. Она должна быть широкой. ВИД СВЕРХУ |








