Техника - молодёжи 1973-11, страница 20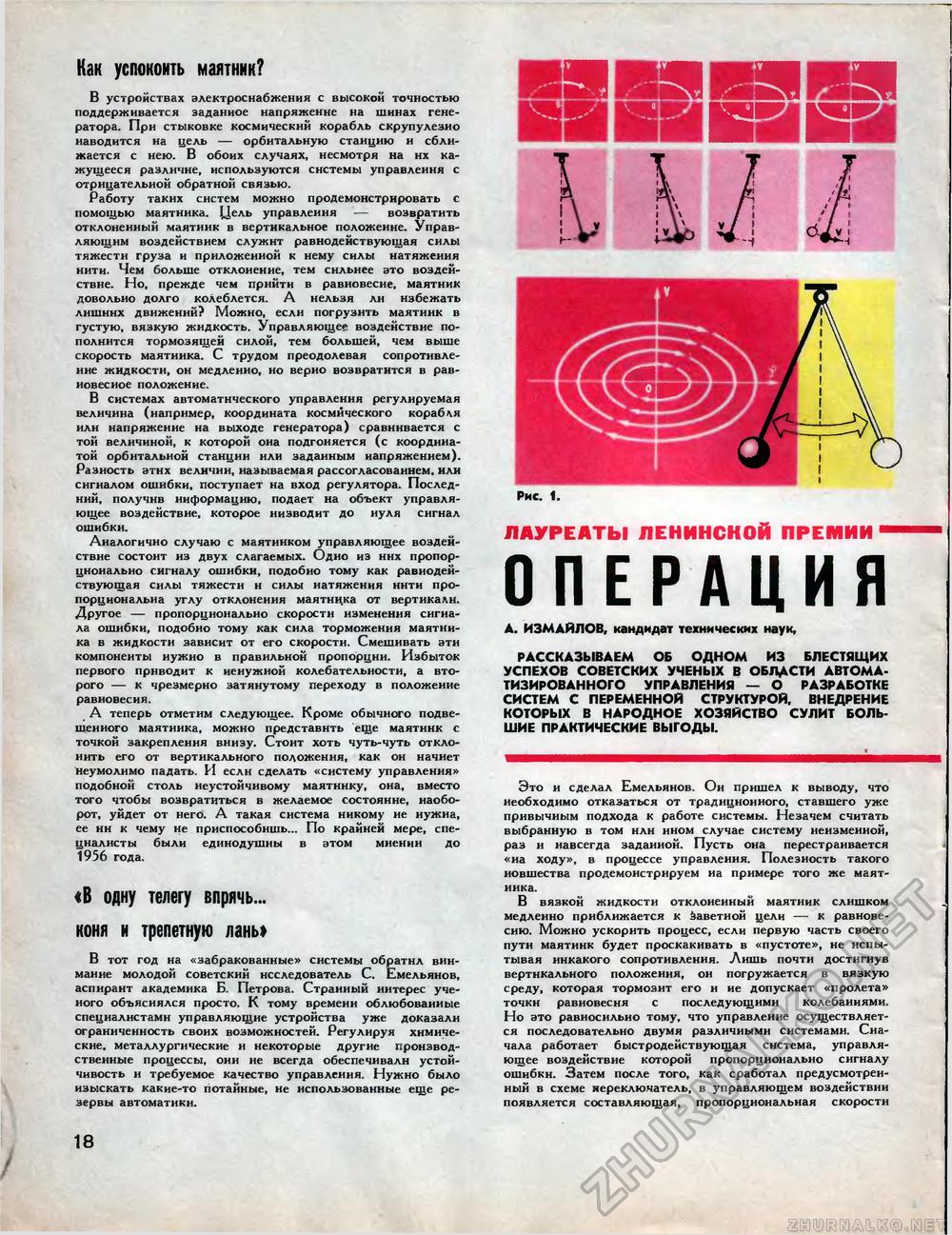
Как успокоить маятник? В устройствах электроснабжения с высокой точностью поддерживается заданное напряжение на шинах генератора. При стыковке космический корабль скрупулезно наводится на цель — орбитальную станцию и сближается с нею. В обоих случаях, несмотря на нх кажущееся различие, используются системы управления с отрицательной обратной связью. Работу таких систем можно продемонстрировать с помощью маятника. Цель управления — возвратить отклоненный маятник в вертикальное положение. Управляющим воздействием служит равнодействующая силы тяжести груза и приложенной к нему силы натяжения нити. Чем больше отклонение, тем сильнее это воздействие. Но, прежде чем прийти в равновесие, маятник довольно долго колеблется. А нельзя ли избежать лишних движений? Можно, если погрузить маятник в густую, вязкую жидкость. Управляющее воздействие пополнится тормозящей силой, тем большей, чем выше скорость маятника. С трудом преодолевая сопротивление жидкости, он медленно, но верно возвратится в равновесное положение. В системах автоматического управления регулируемая величина (например, координата космического корабля илн напряжение на выходе генератора) сравнивается с той величиной, к которой она подгоняется (с координатой орбитальной станции или заданным напряжением). Разность этих величии, называемая рассогласованием, или сигналом ошибки, поступает на вход регулятора. Последний, получив информацию, подает на объект управляющее воздействие, которое низводит до нуля сигнал ошибки. Аналогично случаю с маятником управляющее воздействие состоит из двух слагаемых. Одно из них пропорционально сигналу ошибки, подобно тому как равнодействующая силы тяжести н силы натяжения нити пропорциональна углу отклонения маятника от вертикали. Другое — пропорционально скорости изменения сигнала ошибки, подобно тому как сила торможения маятника в жидкости зависит от его скорости. Смешивать эти компоненты нужно в правильной пропорции. Избыток первого приводит к ненужной колебательности, а второго — к чрезмерно затянутому переходу в положение равновесия. А теперь отметим следующее. Кроме обычного подвешенного маятника, можно представить еще маятник с точкой закрепления внизу. Стоит хоть чуть-чуть отклонить его от вертикального положения, как он начнет неумолимо падать. И если сделать «систему управления» подобной столь неустойчивому маятннку, она, вместо того чтобы возвратиться в желаемое состояние, наоборот, уйдет от него. А такая система никому ие нужна, ее ни к чему не приспособишь... По крайней мере, специалисты были единодушны в этом мнении до 1956 года. «В одну телегу впрячь... коня и трепетную лань» В тот год на «забракованные» системы обратил внимание молодой советский исследователь С. Емельянов, аспирант академика Б. Петрова. Странный интерес ученого объяснялся просто. К тому времени облюбованные специалистами управляющие устройства уже доказали ограниченность своих возможностей. Регулируя химические, металлургические и некоторые другие производственные процессы, оии ие всегда обеспечивали устойчивость и требуемое качество управления. Нужно было изыскать какие-то потайные, не использованные еще резервы автоматики. В I IV Рис. 1. ЛАУРЕАТЫ ЛЕНИНСНОЙ ПРЕМИИ ОПЕРАЦИЯА. ИЗМАЙЛОВ, кандидат технических наук, РАССКАЗЫВАЕМ ОБ ОДНОМ ИЗ БЛЕСТЯЩИХ УСПЕХОВ СОВЕТСКИХ УЧЕНЫХ В ОБЛАСТИ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ — О РАЗРАБОТКЕ СИСТЕМ С ПЕРЕМЕННОЙ СТРУКТУРОЙ. ВНЕДРЕНИЕ КОТОРЫХ В НАРОДНОЕ ХОЗЯЙСТВО СУЛИТ БОЛЬШИЕ ПРАКТИЧЕСКИЕ ВЫГОДЫ. Это и сделал Емельянов. Он пришел к выводу, что необходимо отказаться от традиционного, ставшего уже привычным подхода к работе системы. Незачем считать выбранную в том нлн ином случае систему неизменной, раз и навсегда заданной. Пусть она перестраивается «иа ходу», в процессе управления. Полезность такого новшества продемонстрируем иа примере того же маятника. В вязкой жидкости отклоненный маятник слишком медленно приближается к Заветной цели — к равновесию. Можно ускорить процесс, если первую часть своего пути маятник будет проскакивать в «пустоте», не испытывая никакого сопротивления. Лишь почти достигнув вертикального положения, он погружается в вязкую среду, которая тормозит его и ие допускает «пролета» точки равновесия с последующими колебаниями. Но это равносильно тому, что управление осуществляется последовательно двумя различными системами. Сначала работает быстродействующая система, управляющее воздействие которой пропорционально сигналу ошибки. Затем после того, как сработал предусмотренный в схеме нереклю.чатель, в управляющем воздействии появляется составляющая, пропорциональная скорости 18 |








