Техника - молодёжи 1964-03, страница 44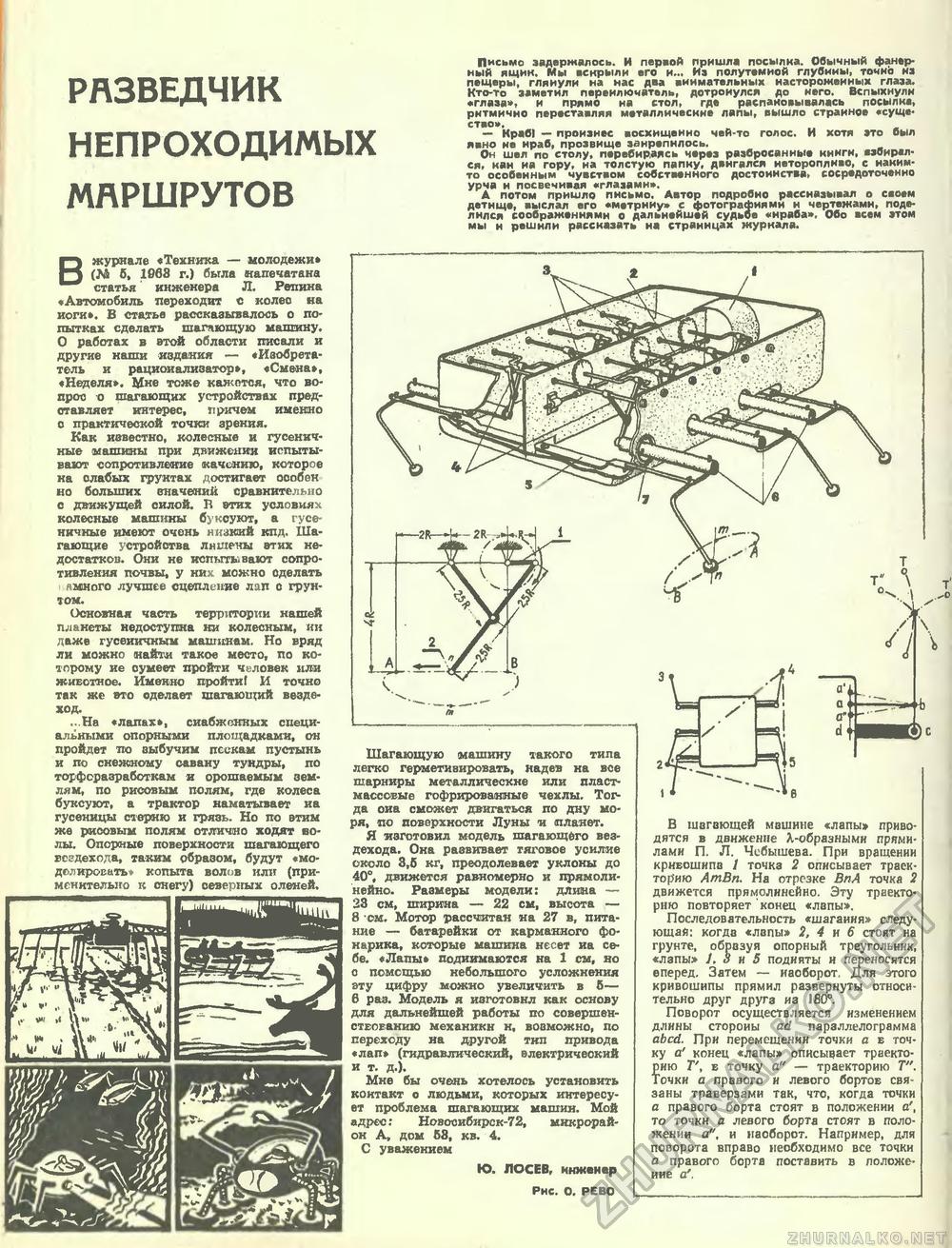
РЯЗВЕДЧИК НЕПРОХОДИМЫХ МАРШРУТОВ Письмо задержалось. И первой пришла посылка. Обычный фанерный ящик. Мы вскрыли его и... Из полутемной глубины, точно из пещеры, глянули иа нас два внимательных настороженных глаза. Кто-то заметил переключатель, дотронулся до него. Вспыхнули «глаза», и прямо на стол, где распаковывалась посылка, ритмично переставляя металлические лапы, вышло странное «существо». — Краб) — произнес восхищенно чей то голос. И котя это был явно ие нраб, прозвище закрепилось. Он шел по столу, перебираясь червз разбросанные книги, взбирался, кан иа гору, на толстую папку, двигался неторопливо, с наким-то особенным чувством собстввнного достоинства сосредоточенно урча н посвечивая «глазами». А потом пришло письмо. Автор подробно рассназывал о своем детища, выслал его «метрику» с фотографиями и чертежами, поделился соображениями о дальнейшей судьбе «нраба». Обо всем этом мы и решили рассказать на страницах журнала. В журнале «Техника — молодежи» (М б, 1068 г.) была напечатана статья инженера JI. Репина «Автомобиль I рех дит с колес на иоги». В статье рассказывалось о попытках сделать шагающую машину. О работах в этой области писали и другие наши издания — «Изобретатель и рационализатор», «Смена», «Неделя». Мне тоже кажется, что вопрос о шагающих устройствах представляет интерес, причем именно о практической точки зрения. Как известно, колесные и гусеничные машины при движении испытывают сопротивление качению, которое на слабых грунтах достигает особен но больших (значений сравнительно с движущей силой. В втих условиях колесные машины буксуют, a t с ничные имеют очень низкий кпд. Шагающие устройства лишены этих недостатков. Они не испытывают сопротивления почвы, у них можно сделать я много лучшее сцепл ние лап с грунтом. Основная часть территории нашей планеты недоступна ни колесным, ни даже гусеничным машинам. Но вряд ли можно найти такое место, по которому ие сумеет пройти человек или животное. Именно пройти! И точно так же его оделает шагающий вездеход. ...На «лапах», снабженных специальными опорными площадками, он пройдет но выбучим пескам пустынь и по снежному савану тундры, по торфоразработкам и орошаемым землям, по рисовым полям, где колеса буксуют, а трактор наматывает иа гусеницы стерню и грязь. Но по втим же рисовым полям отлично ходят волы. Опорные поверхности шагающего вездехода, таким образом, будут «моделировать» копыта волов или (пр менительио к снегу) северных оленей.
Шагающую машину такого типа легко герметивировать, надев на все шарниры металлические или пластмассовые гофрированные чехлы. Тогда оиа сможет двигаться по дну моря, по поверхности Луны и планет. Я изготовил модель шагающего вездехода. Она развивает тяговое усилие около 3,6 кг, преодолевает уклоны до 40°, движется равномерно и прямолинейно. Размеры модели: длина — 23 см, ширина — 22 см, высота — 8 -ом. Мотор рассчитан на 27 в, питание — батарейки от карманного фо-» рика, которые машина несет иа себе. «Лапы» поднимаются на 1 см, но о помощью небольшого усложнения эту цифру можно увеличить в б— в раз. Модель я изготовил как основу для дальнейшей работы по совершенствованию механики н, возможно, по переходу на другой тип привода «лап» (гидравлический, влектричеокий и т. д.). Мне бы очень хотелось установить контакт о людьми, которых интересует проблема шагающих машин. Мой адрес: Новооибнрск-72, микрорайон А, дом 68, кв. 4. С уважением Ю. ЛОСЕВ, инженер Рнс. О. РЕВО В шагающей машине «лапы» приводятся в движение Я-образны ми прями-лами П. Л. Чебышева. При вращении кривошипа / точка 2 описывает траекторию АтВп. На отрезке ВпА точка 2 движется прямолинейно. Эту траекторию повторяет конец «лзпы». Последовательность «шагания» следующая когда «лзпы» 2, 4 н 6 стоят на грунте, образуя опорный треугольник, «лзпы» 1. 3 и 5 подняты и переносятся вперед. Затем — наоборот. Для этого кривошипы прямил развернуты относительно друг другз из 180°. Поворот осуществляется изменением длины стороны ad параллелограмма abed При перемещении точки а в точку а' конец «лапы» описывает траекторию Т', в точку а" — траекторию Т". Точки а правого и левого бортов связаны траверзами так, что, когда точки а правого борта стоят в положении о', то точки а левого борта стоят в положении а", и наоборот. Например, для поворота вправо необходимо все точки а правого борта поставить в положение а'. |








