Юный техник - для умелых рук 1976-08, страница 7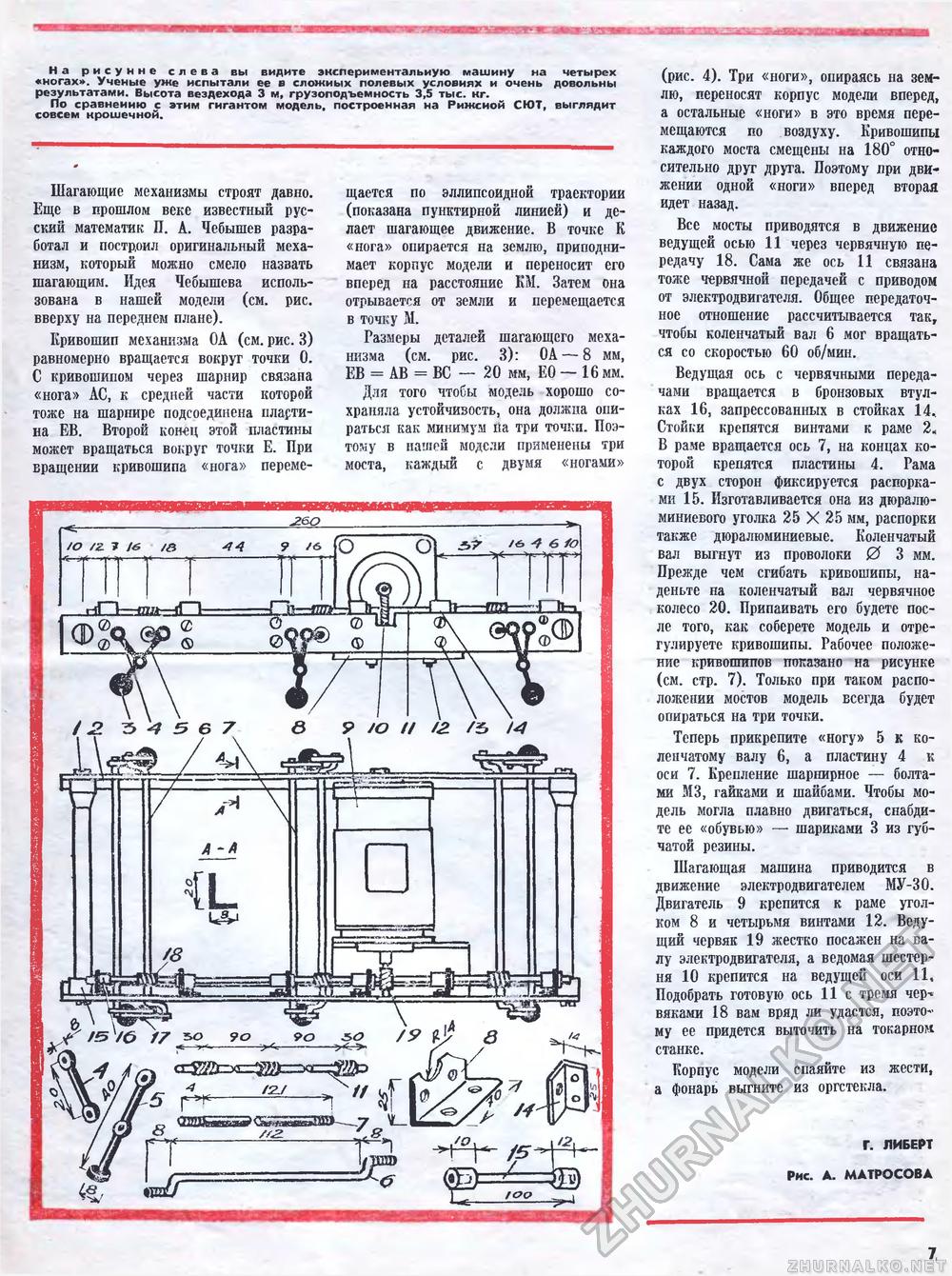
На рисунне слева вы видите экспериментальную машину на четырех «ногах». Ученые уже испытали ее в сложных полевых условиях и очень довольны результатами. Высота вездехода 3 м, грузоподъемность 3,5 тыс. кг. По сравнению с этим гигантом модель, построенная на Рижсиой СЮТ, выглядит совсем крошечной. Шагающие механизмы строят давно. Еще в прошлом веке известный русский математик П. А. Чебышев разработал и построил оригинальный механизм, который можно смело назвать шагающим. Идея Чебышева использована в нашей модели (см. рис. вверху на переднем плане). Кривошип механизма OA (см. рис. 3) равномерно вращается вокруг точки 0. С кривошипом через шарнир связана «нога» АС, к средней части которой тоже на шарнире подсоединена пластина ЕВ. Второй конец этой пластины может вращаться вокруг точки Е. При вращении кривошипа «нога» переме щается по эллипсоидной траектории (показана пунктирной линией) и делает шагающее движение. В точке К «нога» опирается на землю, приподнимает корпус модели и переносит его вперед на расстояние КМ. Затем она отрывается от земли и перемещается в точку М. Размеры деталей шагающего механизма (см. рис. 3): OA — 8 мм, ЕВ = АВ = ВС — 20 мм, Е0 — 16 мм. Для того чтобы модель хорошо сохраняла устойчивость, она должна опираться как минимум па три точки. Поэтому в нашей модели применены три моста, каждый с двумя «ногами» (рис. 4). Три «ноги», опираясь на землю, переносят корпус модели вперед, а остальные «ноги» в это время перемещаются по воздуху. Кривошипы каждого моста смещены на 180° относительно друг друга. Поэтому при движении одной «ноги» вперед вторая идет назад. Все мосты приводятся в движение ведущей осью 11 через червячную передачу 18. Сама же ось 11 связана тоже червячной передачей с приводом от электродвигателя. Общее передаточное отношение рассчитывается так, чтобы коленчатый вал 6 мог вращаться со скоростью 60 об/мин. Ведущая ось с червячными передачами вращается в бронзовых втулках 16, запрессованных в стойках 14, Стойки крепятся винтами к раме 2, В раме вращается ось 7, на концах которой крепятся пластины 4. Рама с двух сторон фиксируется распорками 15. Изготавливается она из дюралюминиевого уголка 25 X 25 мм, распорки также дюралюминиевые. Коленчатый вал выгнут из проволоки 0 3 мм. Прежде чем сгибать кривошипы, наденьте на коленчатый вал червячное колесо 20. Припаивать его будете после того, как соберете модель и отрегулируете кривошипы. Рабочее положение кривошипов показано на рисунке (см. стр. 7). Только при таком расположении мостов модель всегда будет опираться на три точки. Теперь прикрепите «ногу» 5 к коленчатому валу 6, а пластину 4 к оси 7. Крепление шарнирное — болтами МЗ, гайками и шайбами. Чтобы модель могла плавно двигаться, снабдите ее «обувью» — шариками 3 из губчатой резины. Шагающая машина приводится в движение электродвигателем МУ-30. Двигатель 9 крепится к раме уголком 8 и четырьмя винтами 12. Ведущий червяк 19 жестко посажен на валу электродвигателя, а ведомая шестерня 10 крепится на ведущей оси 11, Подобрать готовую ось 11 с тремя чер* вяками 18 вам вряд ли удастся, поэтому ее придется выточить на токарной станке. Корпус модели спаяйте из жести, а фонарь выгните из оргстекла. Г. ЛИБЕРТ Рис. А. МАТРОСОВА ^ I fa-^-^ ff г» » //«2 8. 7 |








