Техника - молодёжи 1996-12, страница 17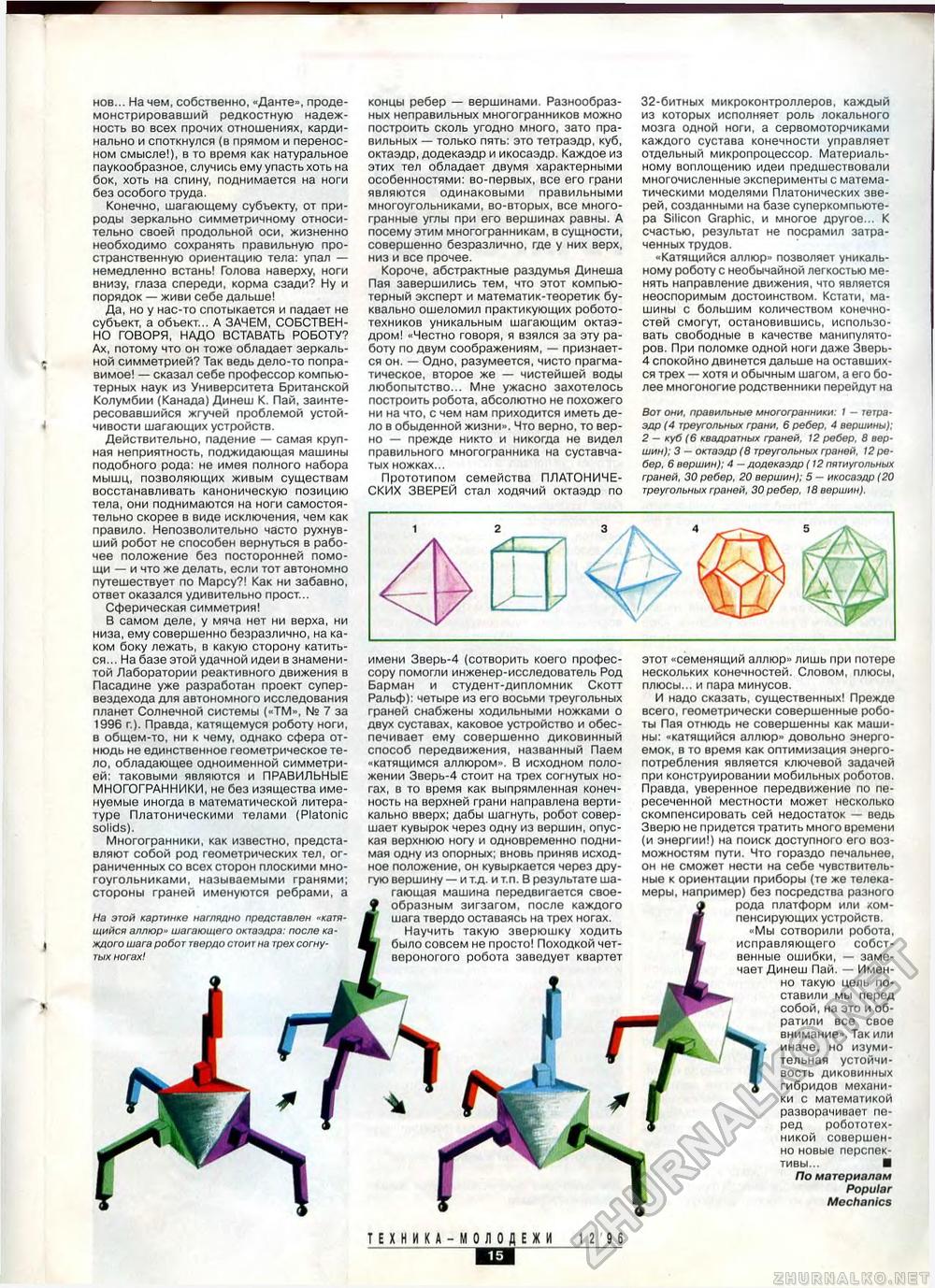
нов... На чем, собственно, «Данте», продемонстрировавший редкостную надежность во всех прочих отношениях, кардинально и споткнулся (в прямом и переносном смысле!), в то время как натуральное паукообразное, случись ему упасть хоть на бок, хоть на спину, поднимается на ноги без особого труда. Конечно, шагающему субъекту, от природы зеркально симметричному относительно своей продольной оси, жизненно необходимо сохранять правильную пространственную ориентацию тела: упал — немедленно встань! Голова наверху, ноги внизу, глаза спереди, корма сзади? Ну и порядок — живи себе дальше! Да, но у нас-то спотыкается и падает не субъект, а объект... А ЗАЧЕМ, СОБСТВЕННО ГОВОРЯ, НАДО ВСТАВАТЬ РОБОТУ? Ах, потому что он тоже обладает зеркальной симметрией? Так ведь дело-то поправимое! — сказал себе профессор компьютерных наук из Университета Британской Колумбии (Канада) Динеш К. Пай, заинтересовавшийся жгучей проблемой устойчивости шагающих устройств. Действительно, падение — самая крупная неприятность, поджидающая машины подобного рода: не имея полного набора мышц, позволяющих живым существам восстанавливать каноническую позицию тела, они поднимаются на ноги самостоятельно скорее в виде исключения, чем как правило. Непозволительно часто рухнувший робот не способен вернуться в рабочее положение без посторонней помощи—и что же делать, если тот автономно путешествует по Марсу?! Как ни забавно, ответ оказался удивительно прост... Сферическая симметрия! В самом деле, у мяча нет ни верха, ни низа, ему совершенно безразлично, на каком боку лежать, в какую сторону катиться... На базе этой удачной идеи в знаменитой Лаборатории реактивного движения в Пасадине уже разработан проект супервездехода для автономного исследования планет Солнечной системы («ТМ», № 7 за 1996 г.). Правда, катящемуся роботу ноги, в общем-то, ни к чему, однако сфера отнюдь не единственное геометрическое тело, обладающее одноименной симметрией: таковыми являются и ПРАВИЛЬНЫЕ МНОГОГРАННИКИ, не без изящества именуемые иногда в математической литературе Платоническими телами (Platonic solids). Многогранники, как известно, представляют собой род геометрических тел, ограниченных со всех сторон плоскими многоугольниками, называемыми гранями; стороны граней именуются ребрами, а На этой картинке наглядно представлен «j щийся аллюр» шагающего октаэдра: п ждого шага робот твердо стоит на трех концы ребер — вершинами. Разнообразных неправильных многогранников можно построить сколь угодно много, зато правильных — только пять: это тетраэдр, куб, октаэдр, додекаэдр и икосаэдр. Каждое из этих тел обладает двумя характерными особенностями: во-первых, все его грани являются одинаковыми правильными многоугольниками, во-вторых, все многогранные углы при его вершинах равны. А посему этим многогранникам, в сущности, совершенно безразлично, где у них верх, низ и все прочее. Короче, абстрактные раздумья Динеша Пая завершились тем, что этот компьютерный эксперт и математик-теоретик бу квально ошеломил практикующих робота техников уникальным шагающим о дром! «Честно говоря, я взялся за эту ра боту по двум соображениям, — признает ся он. — Одно, разумеется, чисто прагматическое, второе же — чистейшей воды любопытство... Мне ужасно захотелось построить робота, абсолютно не похожего ни на что, с чем нам приходится иметь дело в обыденной жизни». Что верно, то верно — прежде никто и никогда не видел правильного многогранника на суставчатых ножках... Прототипом семейства ПЛАТОНИЧЕСКИХ ЗВЕРЕЙ стал ходячий октаэдр по 32-битных микроконтроллеров, каждый из которых исполняет роль локального мозга одной ноги, а сервомоторчиками каждого сустава конечности управляет отдельный микропроцессор. Материальному воплощению идеи предшествовали многочисленные эксперименты с математическими моделями Платонических зверей, созданными на базе суперкомпьютера Silicon Graphic, и многое другое... К счастью, результат не посрамил затраченных трудов. «Катящийся аллюр» позволяет уникальному роботу с необычайной легкостью менять направление движения, что является неоспоримым достоинством. Кстати, машины с большим количеством конечностей смогут, остановившись, использовать свободные в качестве манипуляторов. При поломке одной ноги даже Зверь-4 спокойно двинется дальше на оставшихся трех — хотя и обычным шагом, а его бо-э родственники перейдут на Вот они, правильные многогранники: I — тетраэдр (4 треугольных грани, 6 ребер, 4 вершины); 2 - куб (6 квадратных граней, 12 ребер, 8 вершин); 3 — октаэдр (8 треугольных граней, 12 ребер, 6 вершин); 4 — додекаэдр (12 пятиугольных граней, 30 ребер, 20 вершин); 5 - икосаэдр (20 треугольных граней, 30 ребер, 18 вершин). имени Зверь-4 (сотворить коего профессору помогли инженер-исследователь Род Барман и студент-дипломник Скотт Ральф): четыре из его восьми треугольных граней снабжены ходильными ножками о двух суставах, каковое устройство и обеспечивает ему совершенно диковинный способ передвижения, названный Паем «катящимся аллюром». В исходном положении Зверь-4 стоит на трех согнутых гах, в то время как выпрямленная кон ность на верхней грани направлена верти кально вверх; дабы шагнуть, робот совер шает кувырок через одну из вершин, опус кая верхнюю ногу и одновременно подни мая одну из опорных; вновь приняв исход ное положение, он кувыркается через дру гую вершину — и т.д. и т.п. В результате ша гающая машина передвигается своеобразным зигзагом, после каждого твердо оставаясь на трех ногах. Научить такую зверюшку ходить было совсем не просто! Походкой четвероногого робота заведует квартет этот «семенящии аллюр» лишь при потере нескольких конечностей. Словом, плюсы, плюсы... и пара минусов. И надо сказать, существенных! Прежде всего, геометрически совершенные роботы Пая отнюдь не совершенны как машины: «катящийся аллюр» довольно энергоемок, в то время как оптимизация энергопотребления является ключевой задачей при конструировании мобильных роботов. Правда, уверенное передвижение по пересеченной местности может несколько скомпенсировать сей недостаток — ведь Зверю не придется тратить много времени (и энергии!) на поиск доступного его возможностям пути. Что гораздо печальнее, он не сможет нести на себе чувствительные к ориентации приборы (те же телекамеры, например) без посредства разного рода платформ или компенсирующих устройств. «Мы сотворили робота, исправляющего собственные ошибки, — замечает Динеш Пай. — Именно такую цель поставили мы перед собой, на это и обратили все свое внимание». Так или иначе, но изумительная устойчивость диковинных гибридов механики с математикой разворачивает перед робототехникой совершенно новые перспективы... ■ По материалам Popular Mechanics т е x н и к а - м о л о д е ж и 12 9 6 шм |








