Техника - молодёжи 2006-02, страница 42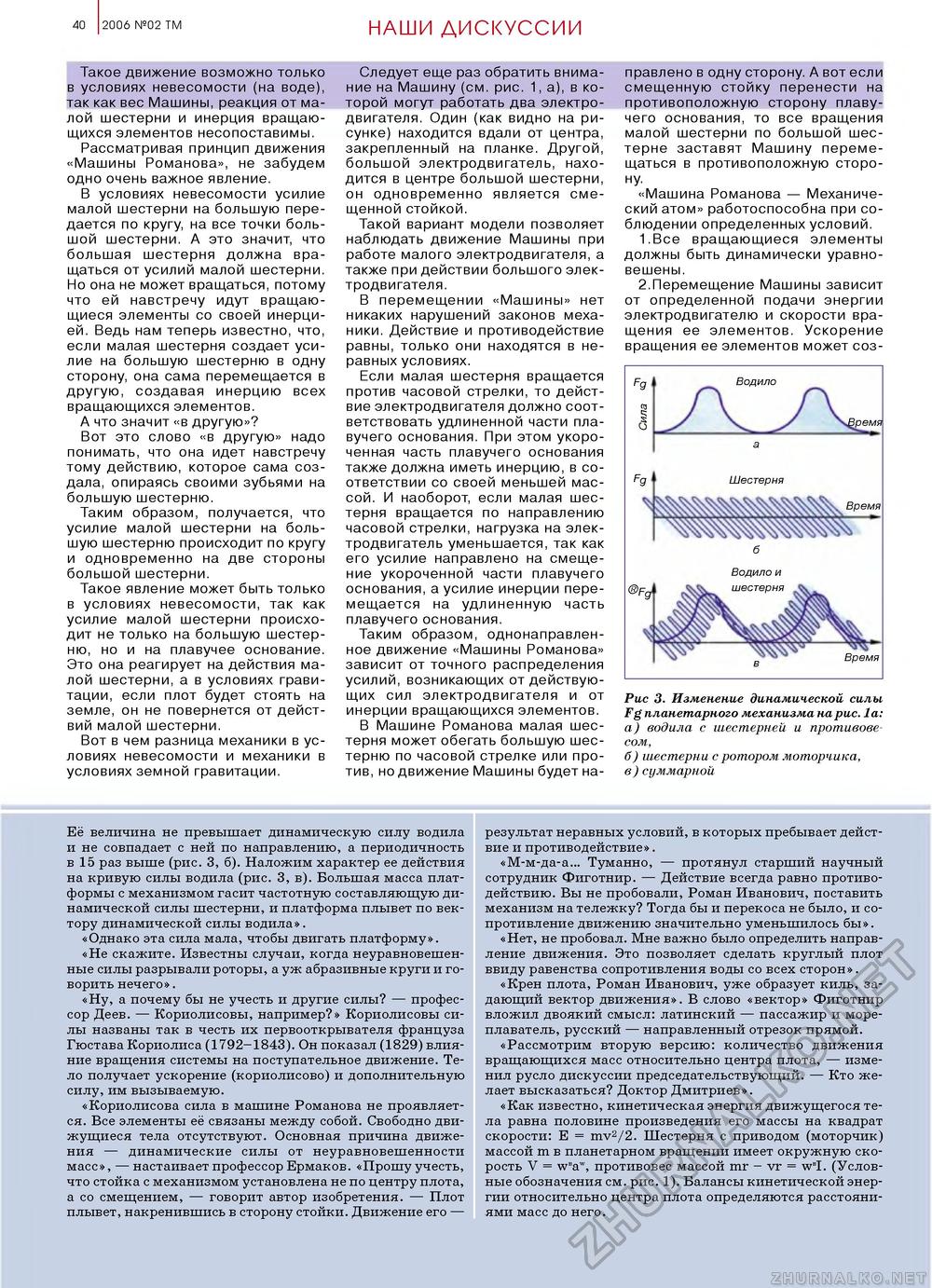
40 2006 №02 ТМ Н А Ш И Д И С КУС С И И Такое движение возможно только в условиях невесомости (на воде), так как вес Машины, реакция от малой шестерни и инерция вращающихся элементов несопоставимы. Рассматривая принцип движения «Машины Романова», не забудем одно очень важное явление. В условиях невесомости усилие малой шестерни на большую передается по кругу, на все точки большой шестерни. А это значит, что большая шестерня должна вращаться от усилий малой шестерни. Но она не может вращаться, потому что ей навстречу идут вращающиеся элементы со своей инерцией. Ведь нам теперь известно, что, если малая шестерня создает усилие на большую шестерню в одну сторону, она сама перемещается в другую, создавая инерцию всех вращающихся элементов. А что значит «в другую»? Вот это слово «в другую» надо понимать, что она идет навстречу тому действию, которое сама создала, опираясь своими зубьями на большую шестерню. Таким образом, получается, что усилие малой шестерни на большую шестерню происходит по кругу и одновременно на две стороны большой шестерни. Такое явление может быть только в условиях невесомости, так как усилие малой шестерни происходит не только на большую шестерню, но и на плавучее основание. Это она реагирует на действия малой шестерни, а в условиях гравитации, если плот будет стоять на земле, он не повернется от действий малой шестерни. Вот в чем разница механики в условиях невесомости и механики в условиях земной гравитации. Следует еще раз обратить внимание на Машину (см. рис. 1, а), в которой могут работать два электродвигателя. Один (как видно на рисунке) находится вдали от центра, закрепленный на планке. Другой, большой электродвигатель, находится в центре большой шестерни, он одновременно является смещенной стойкой. Такой вариант модели позволяет наблюдать движение Машины при работе малого электродвигателя, а также при действии большого электродвигателя. В перемещении «Машины» нет никаких нарушений законов механики. Действие и противодействие равны, только они находятся в неравных условиях. Если малая шестерня вращается против часовой стрелки, то действие электродвигателя должно соответствовать удлиненной части плавучего основания. При этом укороченная часть плавучего основания также должна иметь инерцию, в соответствии со своей меньшей массой. И наоборот, если малая шестерня вращается по направлению часовой стрелки, нагрузка на электродвигатель уменьшается, так как его усилие направлено на смещение укороченной части плавучего основания, а усилие инерции перемещается на удлиненную часть плавучего основания. Таким образом, однонаправленное движение «Машины Романова» зависит от точного распределения усилий, возникающих от действующих сил электродвигателя и от инерции вращающихся элементов. В Машине Романова малая шестерня может обегать большую шестерню по часовой стрелке или против, но движение Машины будет на правлено в одну сторону. А вот если смещенную стойку перенести на противоположную сторону плавучего основания, то все вращения малой шестерни по большой шестерне заставят Машину перемещаться в противоположную сторону. «Машина Романова — Механический атом» работоспособна при соблюдении определенных условий. 1.Все вращающиеся элементы должны быть динамически уравновешены. 2.Перемещение Машины зависит от определенной подачи энергии электродвигателю и скорости вращения ее элементов. Ускорение вращения ее элементов может соз-
Время Рис 3. Изменение динамической силы Fg планетарного механизма на рис. 1а: а) водила с шестерней и противовесом, б) шестерни с ротором моторчика, в ) суммарной Её величина не превышает динамическую силу водила и не совпадает с ней по направлению, а периодичность в 15 раз выше (рис. 3, б). Наложим характер ее действия на кривую силы водила (рис. 3, в). Большая масса платформы с механизмом гасит частотную составляющую динамической силы шестерни, и платформа плывет по вектору динамической силы водила». «Однако эта сила мала, чтобы двигать платформу». «Не скажите. Известны случаи, когда неуравновешенные силы разрывали роторы, а уж абразивные круги и говорить нечего». «Ну, а почему бы не учесть и другие силы? — профессор Деев. — Кориолисовы, например?» Кориолисовы силы названы так в честь их первооткрывателя француза Гюстава Кориолиса (1792-1843). Он показал (1829) влияние вращения системы на поступательное движение. Тело получает ускорение (кориолисово) и дополнительную силу, им вызываемую. «Кориолисова сила в машине Романова не проявляется. Все элементы её связаны между собой. Свободно движущиеся тела отсутствуют. Основная причина движения — динамические силы от неуравновешенности масс», — настаивает профессор Ермаков. «Прошу учесть, что стойка с механизмом установлена не по центру плота, а со смещением, — говорит автор изобретения. — Плот плывет, накренившись в сторону стойки. Движение его — результат неравных условий, в которых пребывает действие и противодействие». «М-м-да-а... Туманно, — протянул старший научный сотрудник Фиготнир. — Действие всегда равно противодействию. Вы не пробовали, Роман Иванович, поставить механизм на тележку? Тогда бы и перекоса не было, и сопротивление движению значительно уменьшилось бы». «Нет, не пробовал. Мне важно было определить направление движения. Это позволяет сделать круглый плот ввиду равенства сопротивления воды со всех сторон». «Крен плота, Роман Иванович, уже образует киль, задающий вектор движения». В слово «вектор» Фиготнир вложил двоякий смысл: латинский — пассажир и мореплаватель, русский — направленный отрезок прямой. «Рассмотрим вторую версию: количество движения вращающихся масс относительно центра плота, — изменил русло дискуссии председательствующий. — Кто желает высказаться? Доктор Дмитриев». «Как известно, кинетическая энергия движущегося тела равна половине произведения его массы на квадрат скорости: Е = mv2/2. Шестерня с приводом (моторчик) массой m в планетарном вращении имеет окружную скорость V = w"aw, противовес массой mr - vr = w"I. (Условные обозначения см. рис. 1). Балансы кинетической энергии относительно центра плота определяются расстояниями масс до него. |
||||||||||||








