Техника - молодёжи 2011-12, страница 11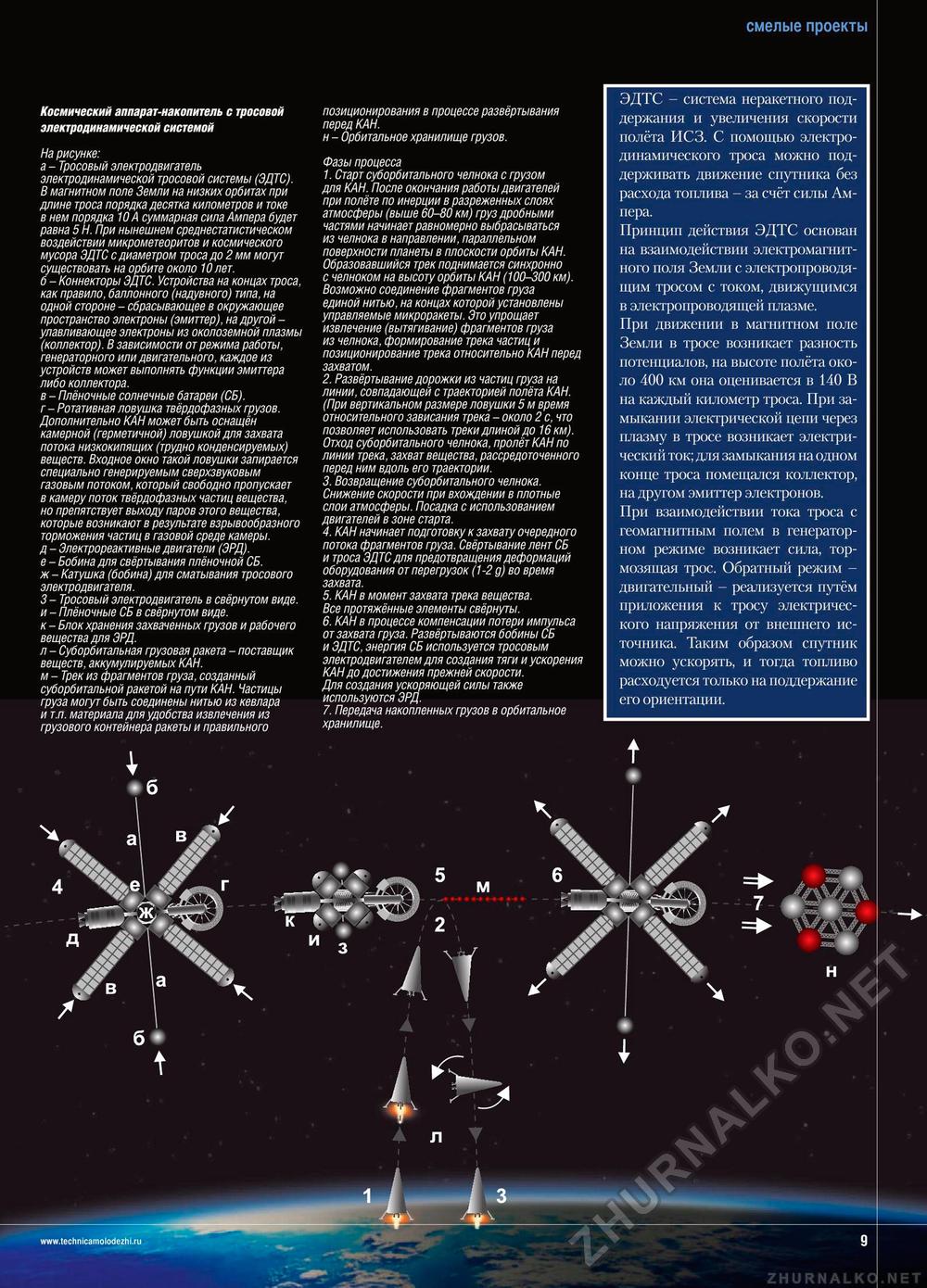
смелые проектыЭДТС - система неракетного поддержания и увеличения скорости полёта ИСЗ. С помощью электродинамического троса можно поддерживать движение спутника без расхода топлива - за счёт силы Ампера. Принцип действия ЭДТС основан па взаимодействии электромагнитного поля Земли с электропроводящим тросом с током, движущимся в электропроводящей плазме. При движении в магнитном поле Земли в тросе возникает разность потенциалов, на высоте полёта около 400 км она оценивается в 140 В на каждый километр троса. При замыкании электрической цепи через плазму в тросе возникает электрический ток; для замыкания па одном конце троса помещался коллектор, на другом эмиттер электронов. При взаимодействии тока троса с геомагнитным полем в генераторном режиме возникает сила, тормозящая трос. Обратный режим -двигательный - реализуется путём приложения к тросу электрического напряжения от внешнего источника. Таким образом спутник можно ускорять, и тогда топливо расходуется только па поддержание его ориентации. Космический аппарат-накопитель с тросовой электродинамической системой На рисунке: а - Тросовый электродвигатель электродинамической тросовой системы (ЭДТС). В магнитном поле Земли на низких орбитах при длине троса порядка десятка километров и токе в нем порядка 10 А суммарная сила Ампера будет равна 5 Н. При нынешнем среднестатистическом воздействии микрометеоритов и космического мусора ЭДТС с диаметром троса до 2 мм могут существовать на орбите около 10 лет. б - Коннекторы ЭДТС. Устройства на концах троса, как правило, баллонного (надувного) типа, на одной стороне - сбрасывающее в окружающее пространство электроны (эмиттер), на другой -улавливающее электроны из околоземной плазмы (коллектор). В зависимости от режима работы, генераторного или двигательного, каждое из устройств может выполнять функции эмиттера либо коллектора. в - Плёночные солнечные батареи (СБ), г - Ротативная ловушка твердофазных грузов. Дополнительно КАН может быть оснащён камерной (герметичной) ловушкой для захвата потока низкокипящих (трудно конденсируемых) веществ. Входное окно такой ловушки запирается специально генерируемым сверхзвуковым газовым потоком, который свободно пропускает в камеру поток твёрдофазных частиц вещества, но препятствует выходу паров этого вещества, которые возникают в результате взрывообразного торможения частиц в газовой среде камеры, д - Электрореактивные двигатели (ЭРД). е - Бобина для свёртывания плёночной СБ. ж - Катушка (бобина) для сматывания тросового электродвигателя. 3 - Тросовый электродвигатель в свёрнутом виде, и - Плёночные СБ в свёрнутом виде, к - Блок хранения захваченных грузов и рабочего вещества для ЭРД. л - Суборбитальная грузовая ракета - поставщик веществ, аккумулируемых КАН. м - Трек из фрагментов груза, созданный суборбитальной ракетой на пути КАН. Частицы груза могут быть соединены нитью из кевлара и т.п. материала для удобства извлечения из грузового контейнера ракеты и правильного позиционирования в процессе развертывания перед КАН. н - Орбитальное хранилище грузов. Фазы процесса 1. Старт суборбитального челнока с грузом для КАН. После окончания работы двигателей при полёте по инерции в разреженных слоях атмосферы (выше 60-80 км) груз дробными частями начинает равномерно выбрасываться из челнока в направлении, параллельном поверхности планеты в плоскости орбиты КАН. Образовавшийся трек поднимается синхронно с челноком на высоту орбиты КАН (100-300 км). Возможно соединение фрагментов груза единой нитью, на концах которой установлены управляемые микроракеты. Это упрощает извлечение (вытягивание) фрагментов груза из челнока, формирование трека частиц и позиционирование трека относительно КАН перед захватом. 2. Развёртывание дорожки из частиц груза на линии, совпадающей с траекторией полёта КАН. (При вертикальном размере ловушки 5 м время относительного зависания трека - около 2 с, что позволяет использовать треки длиной до 16 км). Отход суборбитального челнока, пролёт КАН по линии трека, захват вещества, рассредоточенного перед ним вдоль его траектории. 3. Возвращение суборбитального челнока. Снижение скорости при вхождении в плотные слои атмосферы. Посадка с использованием двигателей в зоне старта. 4. КАН начинает подготовку к захвату очередного потока фрагментов груза. Свёртывание лент СБ и троса ЭДТС для предотвращения деформаций оборудования от перегрузок (1-2 д) во время захвата. 5. КАН в момент захвата трека вещества. Все протяжённые элементы свёрнуты. 6. КАН в процессе компенсации потери импульса от захвата груза. Развёртываются бобины СБ и ЭДТС, энергия СБ используется тросовым электродвигателем для создания тяги и ускорения КАН до достижения прежней скорости. Для создания ускоряющей силы также используются ЭРД. 7. Передача накопленных грузов в орбитальное хранилище. |








