Техника - молодёжи 1981-07, страница 11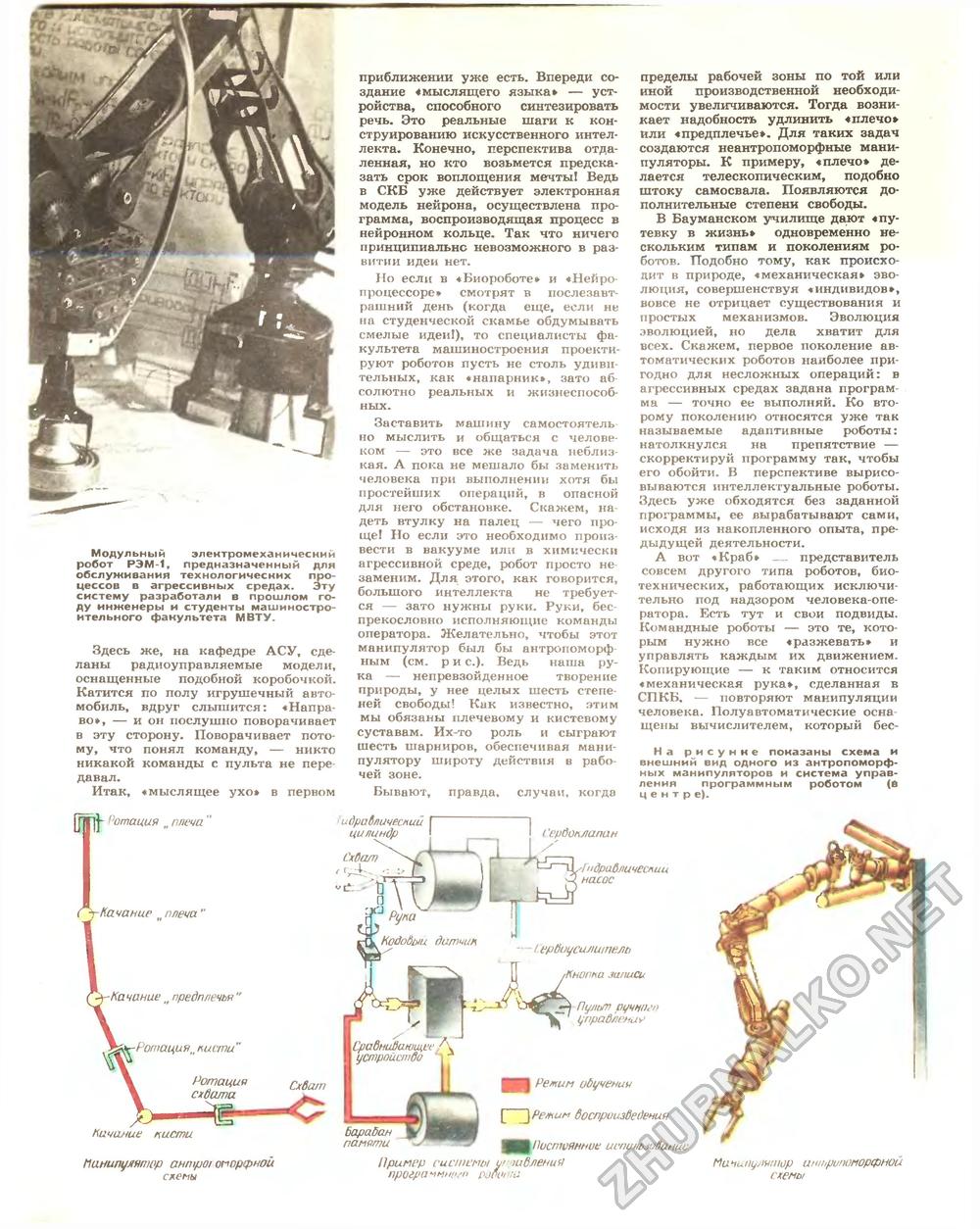
Модульный электромеханический робот РЭМ-1, предназначенный для обслуживания технологических процессов в агрессивных средах. Эту систему разработали в прошлом году инженеры и студенты машиностроительного факультета МВТУ. Здесь же, на кафедре АСУ, сделаны радиоуправляемые модели, оснащенные подобной коробочкой. Катится по полу игрушечный автомобиль, вдруг слышится: «Направо», — и он послушно поворачивает в эту сторону. Поворачивает потому, что понял команду, — никто никакой команды с пульта не передавал. Итак, «мыслящее ухо» в первом приближении уже есть. Впереди создание «мыслящего языка» — устройства, способного синтезировать речь. Это реальные шаги к конструированию искусственного интеллекта. Конечно, перспектива отдаленная, но кто возьмется предсказать срок воплощения мечты! Ведь в СКВ уже действует электронная модель нейрона, осуществлена программа, воспроизводящая процесс в нейронном кольце. Так что ничего принципиально невозможного в развитии идеи нет. Но если в «Биороботе» и «Нейро-процессоре» смотрят в послезавтрашний день (когда еще, если не на студенческой скамье обдумывать смелые идеи!), то специалисты факультета машиностроения проектируют роботов пусть не столь удивительных, как «напарник», зато абсолютно реальных и жизнеспособных. Заставить машину самостоятель но мыслить и общаться с человеком — это все же задача неблизкая. А пока не мешало бы заменить человека при выполнении хотя бы простейших операций, в опасной для него обстановке. Скажем, на деть втулку на палец — чего проще! Но если это необходимо произвести в вакууме или в химически агрессивной среде, робот просто незаменим. Для этого, как говорится, большого интеллекта не требуется — зато нужны руки. Руки, беспрекословно исполняющие команды оператора. Желательно, чтобы этот манипулятор был бы антропоморфным (см. р и е.). Ведь наша рука — непревзойденное творение природы, у нее целых шесть степеней свободы! Как известно, этим мы обязаны плечевому и кистевому суставам. Их-то роль и сыграют шесть шарниров, обеспечивая манипулятору широту действия в рабочей зоне. Бывают, правда, случаи, когда пределы рабочей зоны по той или иной производственной необходимости увеличиваются. Тогда возникает надобность удлинить «плечо» или «предплечье». Для таких задач создаются неантропоморфные манипуляторы. К примеру, «плечо» делается телескопическим, подобно штоку самосвала. Появляются дополнительные степени свободы. В Бауманском училище далот «путевку в жизнь» одновременно нескольким типам и поколениям роботов. Подобно тому, как происходит в природе, «механическая» эволюция, совершенствуя «индивидов», вовсе не отрицает существования и простых механизмов. Эволюция эволюцией, но дела хватит для всех. Скажем, первое поколение автоматических роботов наиболее пригодно для несложных операций: в агрессивных средах задана программа — точно ее выполняй. Ко второму поколению относятся уже так называемые адаптивные роботы: натолкнулся на препятствие — скорректируй программу так, чтобы его обойти. В перспективе вырисовываются интеллектуальные роботы. Здесь уже обходятся без заданной программы, ее вырабатывают сами, исходя из накопленного опыта, предыдущей деятельности. А вот «Краб» ___ представитель совсем другого типа роботов, биотехнических, работающих исключительно под надзором человека-опе-ратора. Есть тут и свои подвиды. Командные роботы — это те, которым нужно все «разжевать» и управлять каждым их движением. Копирующие — к таким относится «механическая рука», сделанная в СПКБ. — повторяют манипуляции человека. Полуавтоматические осна щены вычислителем, который бес- На рисунне показаны схема и внешний вид одного из антропоморфных манипуляторов и система управления программным роботом (6 центре). отация плеча ( тКачание плеча" Качание н предплечья " L 'ервоплапан 1 Рупа . Кобобыи Датчик ■["драбличеспии насос t ервиусилитель ■Кнопка записи Л Кичание кисти Нанипуяяпюр антро/ опорфной схемы Пулып ручного управление Э Ретим обучении [ -^Ретим воспроизведения Пример системы програчмнщп pjt у> ш тч Писпюянние испипьзоОание /ивлений Мичипулинюр ит:,риПОМОрфНОи схема |








