Техника - молодёжи 1986-03, страница 60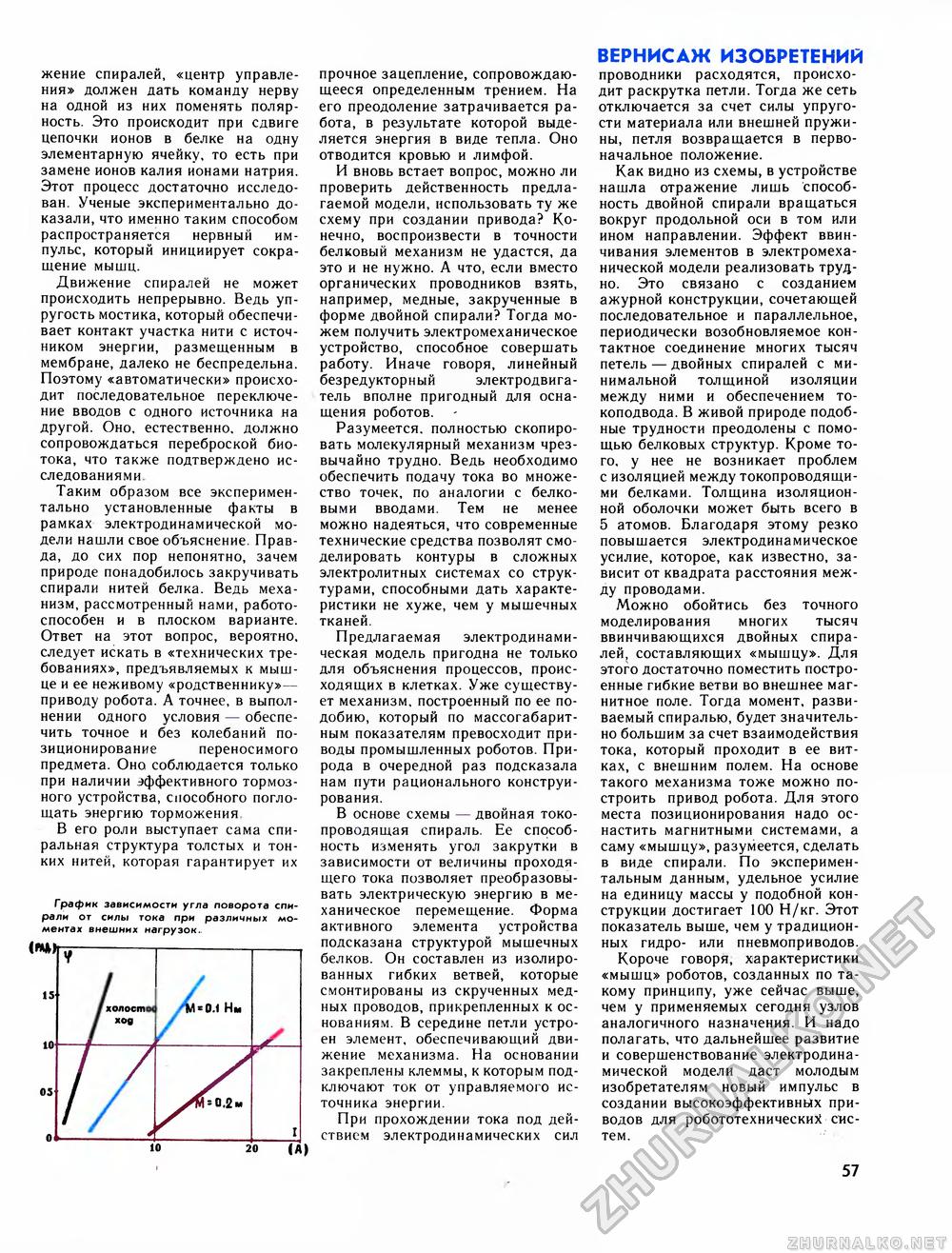
жение спиралей, «центр управления» должен дать команду нерву на одной из них поменять полярность. Это происходит при сдвиге цепочки ионов в белке на одну элементарную ячейку, то есть при замене ионов калия ионами натрия. Этот процесс достаточно исследован. Ученые экспериментально доказали, что именно таким способом распространяется нервный импульс, который инициирует сокращение мышц. Движение спиралей не может происходить непрерывно. Ведь упругость мостика, который обеспечивает контакт участка нити с источником энергии, размещенным в мембране, далеко не беспредельна. Поэтому «автоматически» происходит последовательное переключение вводов с одного источника на другой. Оно, естественно, должно сопровождаться переброской биотока, что также подтверждено исследованиями Таким образом все экспериментально установленные факты в рамках электродинамической модели нашли свое объяснение. Правда, до сих пор непонятно, зачем природе понадобилось закручивать спирали нитей белка. Ведь механизм, рассмотренный нами, работоспособен и в плоском варианте. Ответ на этот вопрос, вероятно, следует искать в «технических требованиях», предъявляемых к мышце и ее неживому «родственнику»— приводу робота. А точнее, в выполнении одного условия — обеспечить точное и без колебаний позиционирование переносимого предмета. Оно соблюдается только при наличии эффективного тормозного устройства, способного поглощать энергию торможения В его роли выступает сама спиральная структура толстых и тонких нитей, которая гарантирует их Г рафик зависимости угла поворота спирали от силы тока при различных моментах внешних нагрузок. Г рафик зависимости угла поворота спирали от силы тока при различных моментах внешних нагрузок.
Ю 20 (А) Ю 20 (А) прочное зацепление, сопровождающееся определенным трением. На его преодоление затрачивается работа, в результате которой выделяется энергия в виде тепла. Оно отводится кровью и лимфой. И вновь встает вопрос, можно ли проверить действенность предлагаемой модели, использовать ту же схему при создании привода? Конечно, воспроизвести в точности белковый механизм не удастся, да это и не нужно. А что, если вместо органических проводников взять, например, медные, закрученные в форме двойной спирали? Тогда можем получить электромеханическое устройство, способное совершать работу. Иначе говоря, линейный безредукторный электродвигатель вполне пригодный для оснащения роботов. Разумеется, полностью скопировать молекулярный механизм чрезвычайно трудно. Ведь необходимо обеспечить подачу тока во множество точек, по аналогии с белковыми вводами. Тем не менее можно надеяться, что современные технические средства позволят смоделировать контуры в сложных электролитных системах со структурами, способными дать характеристики не хуже, чем у мышечных тканей. Предлагаемая электродинамическая модель пригодна не только для объяснения процессов, происходящих в клетках. Уже существует механизм, построенный по ее подобию, который по массогабарит-ным показателям превосходит приводы промышленных роботов. Природа в очередной раз подсказала нам пути рационального конструирования. В основе схемы — двойная токо-проводящая спираль. Ее способность изменять угол закрутки в зависимости от величины проходящего тока позволяет преобразовывать электрическую энергию в механическое перемещение. Форма активного элемента устройства подсказана структурой мышечных белков. Он составлен из изолированных гибких ветвей, которые смонтированы из скрученных медных проводов, прикрепленных к основаниям. В середине петли устроен элемент, обеспечивающий движение механизма. На основании закреплены клеммы, к которым подключают ток от управляемого источника энергии. При прохождении тока под действием электродинамических сил ВЕРНИСАЖ ИЗОБРЕТЕНИИ проводники расходятся, происходит раскрутка петли. Тогда же сеть отключается за счет силы упругости материала или внешней пружины, петля возвращается в первоначальное положение. Как видно из схемы, в устройстве нашла отражение лишь способность двойной спирали вращаться вокруг продольной оси в том или ином направлении. Эффект ввинчивания элементов в электромеханической модели реализовать трудно. Это связано с созданием ажурной конструкции, сочетающей последовательное и параллельное, периодически возобновляемое контактное соединение многих тысяч петель — двойных спиралей с минимальной толщиной изоляции между ними и обеспечением то-коподвода. В живой природе подобные трудности преодолены с помощью белковых структур. Кроме того, у нее не возникает проблем с изоляцией между токопроводящи-ми белками. Толщина изоляционной оболочки может быть всего в 5 атомов. Благодаря этому резко повышается электродинамическое усилие, которое, как известно, зависит от квадрата расстояния между проводами. Можно обойтись без точного моделирования многих тысяч ввинчивающихся двойных спиралей, составляющих «мышцу». Для этого достаточно поместить построенные гибкие ветви во внешнее магнитное поле. Тогда момент, развиваемый спиралью, будет значительно большим за счет взаимодействия тока, который проходит в ее витках, с внешним полем. На основе такого механизма тоже можно построить привод робота. Для этого места позиционирования надо оснастить магнитными системами, а саму «мышцу», разумеется, сделать в виде спирали. По экспериментальным данным, удельное усилие на единицу массы у подобной конструкции достигает 100 Н/кг. Этот показатель выше, чем у традиционных гидро- или пневмоприводов. Короче говоря, характеристики «мышц» роботов, созданных по такому принципу, уже сейчас выше, чем у применяемых сегодня узлов аналогичного назначения. И надо полагать, что дальнейшее развитие и совершенствование электродинамической модели даст молодым изобретателям новый импульс в создании высокоэффективных приводов для робототехнически* систем. 57 |








