Техника - молодёжи 1986-03, страница 7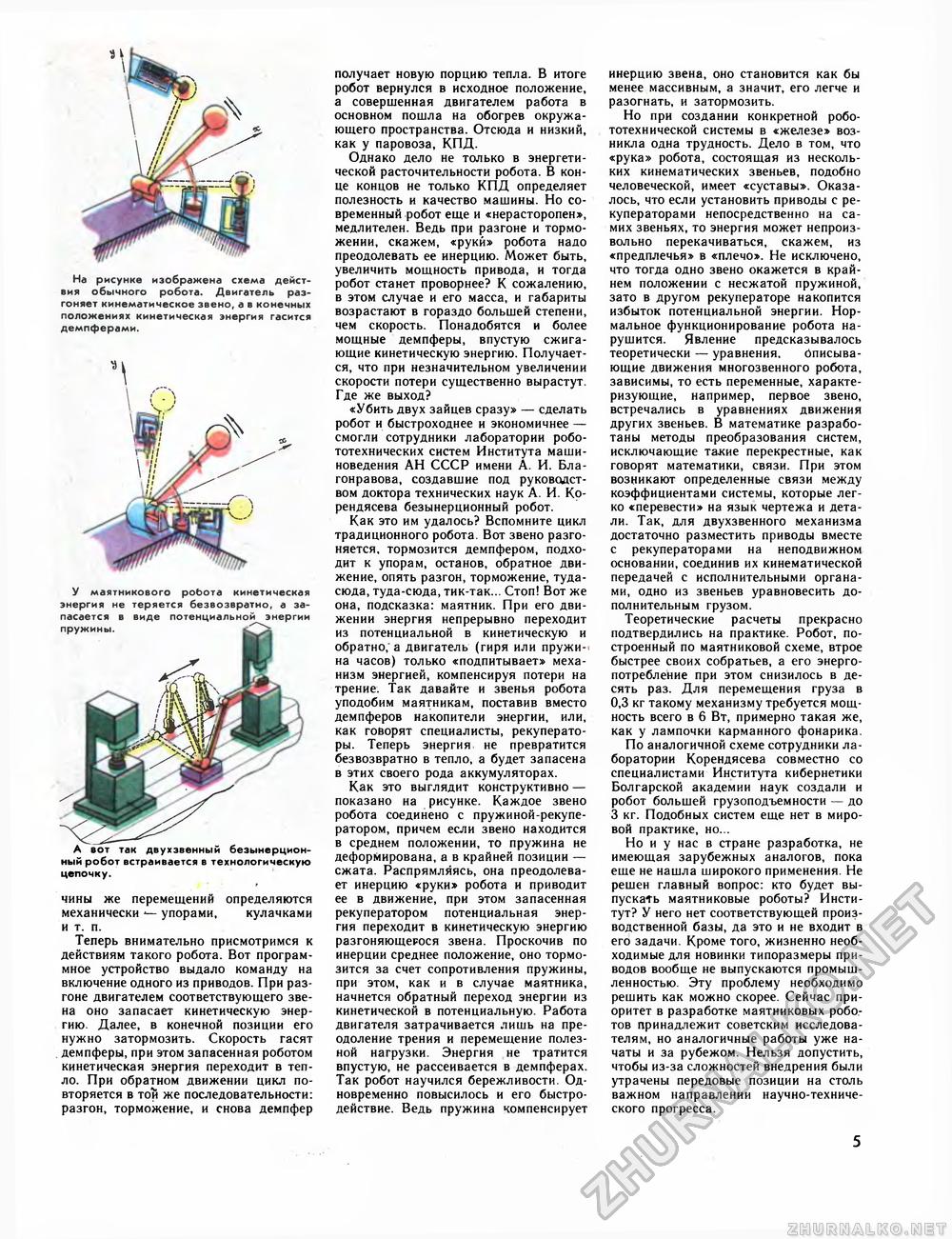
На рисунке изображена схема действия обычного робота. Двигатель разгоняет кинематическое звено, а в конечных положениях кинетическая энергия гасится демпферами. У маятникового роЬота кинетическая энергия не теряется безвозвратно, а запасается в виде потенциальной энергии пружины. бххЗ А вот так двухзвенный безынерционный робот встраивается в технологическую цепочку. чины же перемещений определяются механически упорами, кулачками и т. п. Теперь внимательно присмотримся к действиям такого робота. Вот программное устройство выдало команду на включение одного из приводов. При разгоне двигателем соответствующего звена оно запасает кинетическую энергию. Далее, в конечной позиции его нужно затормозить. Скорость гасят демпферы, при этом запасенная роботом кинетическая энергия переходит в тепло. При обратном движении цикл повторяется в той же последовательности: разгон, торможение, и снова демпфер получает новую порцию тепла. В итоге робот вернулся в исходное положение, а совершенная двигателем работа в основном пошла на обогрев окружающего пространства. Отсюда и низкий, как у паровоза, КПД. Однако дело не только в энергетической расточительности робота. В конце концов не только КПД определяет полезность и качество машины. Но современный робот еще и «нерасторопен», медлителен. Ведь при разгоне и торможении, скажем, «руки» робота надо преодолевать ее инерцию. Может быть, увеличить мощность привода, и тогда робот станет проворнее? К сожалению, в этом случае и его масса, и габариты возрастают в гораздо большей степени, чем скорость. Понадобятся и более мощные демпферы, впустую сжигающие кинетическую энергию. Получается, что при незначительном увеличении скорости потери существенно вырастут. Где же выход? «Убить двух зайцев сразу» — сделать робот и быстроходнее и экономичнее — смогли сотрудники лаборатории робо-тотехнических систем Института машиноведения АН СССР имени А. И. Бла-гонравова, создавшие под руководством доктора технических наук А. И. Ко-рендясева безынерционный робот. Как это им удалось? Вспомните цикл традиционного робота. Вот звено разгоняется, тормозится демпфером, подходит к упорам, останов, обратное движение, опять разгон, торможение, туда-сюда, туда-сюда, тик-так... Стоп! Вот же она, подсказка: маятник. При его движении энергия непрерывно переходит из потенциальной в кинетическую и обратно; а двигатель (гиря или пружина часов) только «подпитывает» механизм энергией, компенсируя потери на трение. Так давайте и звенья робота уподобим маятникам, поставив вместо демпферов накопители энергии, или, как говорят специалисты, рекуператоры. Теперь энергия не превратится безвозвратно в тепло, а будет запасена в этих своего рода аккумуляторах. Как это выглядит конструктивно — показано на рисунке. Каждое звено робота соединено с пружиной-рекуператором, причем если звено находится в среднем положении, то пружина не деформирована, а в крайней позиции — сжата. Распрямляясь, она преодолевает инерцию «руки» робота и приводит ее в движение, при этом запасенная рекуператором потенциальная энергия переходит в кинетическую энергию разгоняющерося звена. Проскочив по инерции среднее положение, оно тормозится за счет сопротивления пружины, при этом, как и в случае маятника, начнется обратный переход энергии из кинетической в потенциальную. Работа двигателя затрачивается лишь на преодоление трения и перемещение полезной нагрузки. Энергия не тратится впустую, не рассеивается в демпферах. Так робот научился бережливости. Одновременно повысилось и его быстродействие. Ведь пружина компенсирует инерцию звена, оно становится как бы менее массивным, а значит, его легче и разогнать, и затормозить. Но при создании конкретной робо-тотехнической системы в «железе» возникла одна трудность. Дело в том, что «рука» робота, состоящая из нескольких кинематических звеньев, подобно человеческой, имеет «суставы». Оказалось, что если установить приводы с рекуператорами непосредственно на самих звеньях, то энергия может непроизвольно перекачиваться, скажем, из «предплечья» в «плечо». Не исключено, что тогда одно звено окажется в крайнем положении с несжатой пружиной, зато в другом рекуператоре накопится избыток потенциальной энергии. Нормальное функционирование робота нарушится. Явление предсказывалось теоретически — уравнения, вписывающие движения многозвенного робота, зависимы, то есть переменные, характеризующие, например, первое звено, встречались в уравнениях движения других звеньев. В математике разработаны методы преобразования систем, исключающие та-кие перекрестные, как говорят математики, связи. При этом возникают определенные связи между коэффициентами системы, которые легко «перевести» на язык чертежа и детали. Так, для двухзвенного механизма достаточно разместить приводы вместе с рекуператорами на неподвижном основании, соединив их кинематической передачей с исполнительными органами, одно из звеньев уравновесить дополнительным грузом. Теоретические расчеты прекрасно подтвердились на практике. Робот, построенный по маятниковой схеме, втрое быстрее своих собратьев, а его энергопотребление при этом снизилось в десять раз. Для перемещения груза в 0,3 кг такому механизму требуется мощность всего в 6 Вт, примерно такая же, как у лампочки карманного фонарика. По аналогичной схеме сотрудники лаборатории Корендясева совместно со специалистами Института кибернетики Болгарской академии наук создали и робот большей грузоподъемности — до 3 кг. Подобных систем еще нет в мировой практике, но... Но и у нас в стране разработка, не имеющая зарубежных аналогов, пока еще не нашла широкого применения. Не решен главный вопрос: кто будет выпускать маятниковые роботы? Институт? У него нет соответствующей производственной базы, да это и не входит в его задачи. Кроме того, жизненно необходимые для новинки типоразмеры приводов вообще не выпускаются промышленностью. Эту проблему необходимо решить как можно скорее. Сейчас приоритет в разработке маятниковых роботов принадлежит советским исследователям, но аналогичные работы уже начаты и за рубежом. Нельзя допустить, чтобы из-за сложностей внедрения были утрачены передовые позиции на столь важном направлении научно-технического прогресса. 5 |








