Техника - молодёжи 1989-01, страница 30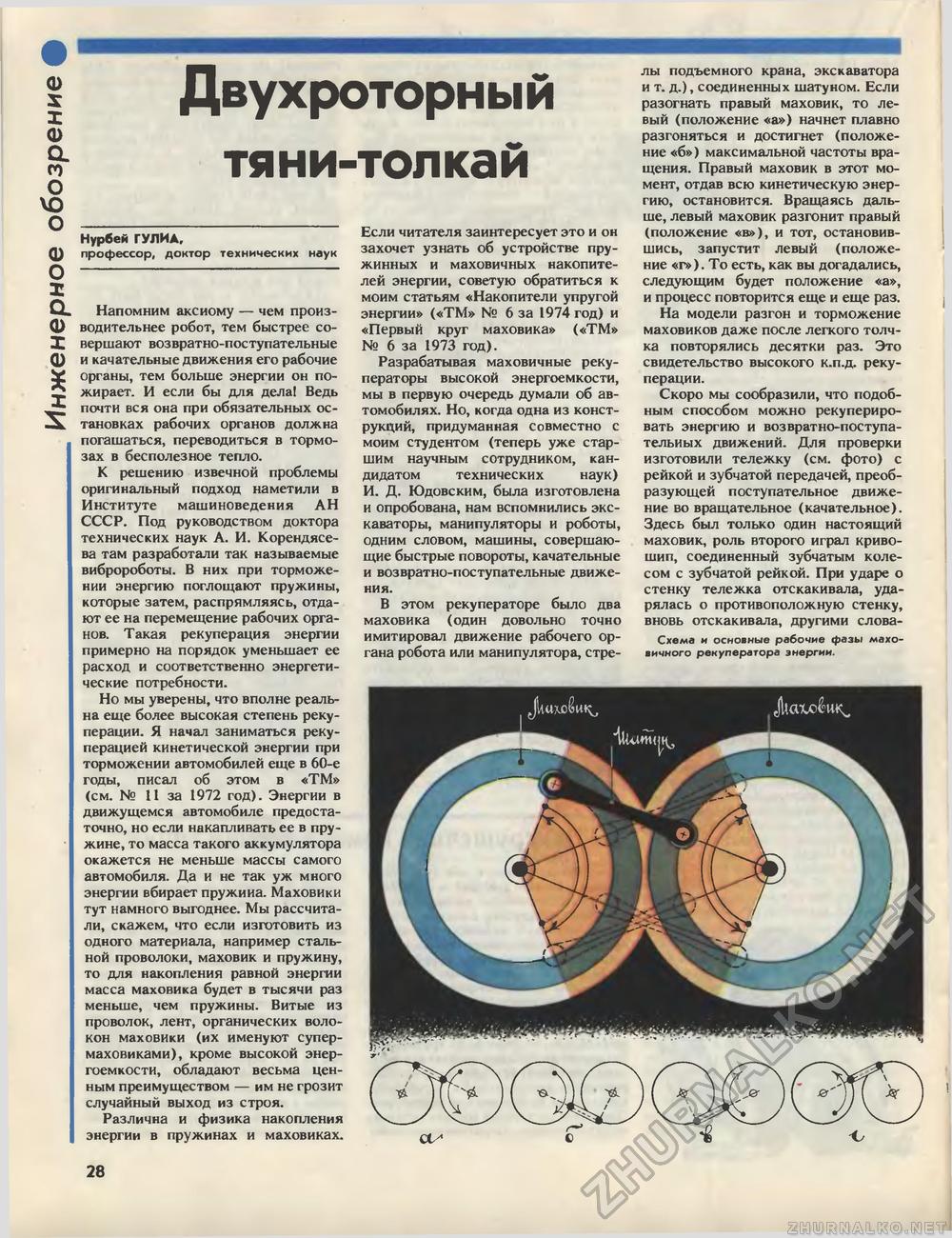
Двухроторный тяни-толкай лы подъемного крана, экскаватора и т. д.), соединенных шатуном. Если разогнать правый маховик, то левый (положение «а») начнет плавно разгоняться и достигнет (положение «б») максимальной частоты вращения. Правый маховик в этот момент, отдав всю кинетическую энергию, остановится. Вращаясь дальше, левый маховик разгонит правый (положение «в»), и тот, остановившись, запустит левый (положение «г»). То есть, как вы догадались, следующим будет положение «а», и процесс повторится еще и еще раз. На модели разгон и торможение маховиков даже после легкого толчка повторялись десятки раз. Это свидетельство высокого к.п.д. рекуперации. Скоро мы сообразили, что подобным способом можно рекуперировать энергию и возвратно-поступательных движений. Для проверки изготовили тележку (см. фото) с рейкой и зубчатой передачей, преобразующей поступательное движение во вращательное (качательное). Здесь был только один настоящий маховик, роль второго играл кривошип, соединенный зубчатым колесом с зубчатой рейкой. При ударе о стенку тележка отскакивала, ударялась о противоположную стенку, вновь отскакивала, другими слова- Схема и основные рабочие фазы махо-вичного рекуператора энергии. Нурбей ГУЛИА, профессор, доктор технических наук Напомним аксиому — чем производительнее робот, тем быстрее совершают возвратно-поступательные и качательные движения его рабочие органы, тем больше энергии он пожирает. И если бы для дела! Ведь почти вся она при обязательных остановках рабочих органов должна погашаться, переводиться в тормозах в бесполезное тепло. К решению извечной проблемы оригинальный подход наметили в Институте машиноведения АН СССР. Под руководством доктора технических наук А. И. Корендясе-ва там разработали так называемые вибророботы. В них при торможении энергию поглощают пружины, которые затем, распрямляясь, отдают ее на перемещение рабочих органов. Такая рекуперация энергии примерно на порядок уменьшает ее расход и соответственно энергетические потребности. Но мы уверены, что вполне реальна еще более высокая степень рекуперации. Я начал заниматься рекуперацией кинетической энергии при торможении автомобилей еще в 60-е годы, писал об этом в «ТМ» (см. № 11 за 1972 год). Энергии в движущемся автомобиле предостаточно, но если накапливать ее в пружине, то масса такого аккумулятора окажется не меньше массы самого автомобиля. Да и не так уж много энергии вбирает пружина. Маховики тут намного выгоднее. Мы рассчитали, скажем, что если изготовить из одного материала, например стальной проволоки, маховик и пружину, то для накопления равной энергии масса маховика будет в тысячи раз меньше, чем пружины. Витые из проволок, лент, органических волокон маховики (их именуют супермаховиками), кроме высокой энергоемкости, обладают весьма ценным преимуществом — им не грозит случайный выход из строя. Различна и физика накопления энергии в пружинах и маховиках. Если читателя заинтересует это и он захочет узнать об устройстве пружинных и маховнчных накопителей энергии, советую обратиться к моим статьям «Накопители упругой энергии» («ТМ» № 6 за 1974 год) и «Первый круг маховика» («ТМ» № 6 за 1973 год). Разрабатывая маховичные рекуператоры высокой энергоемкости, мы в первую очередь думали об автомобилях. Но, когда одна из конструкций, придуманная совместно с моим студентом (теперь уже старшим научным сотрудником, кандидатом технических наук) И. Д. Юдовским, была изготовлена и опробована, нам вспомнились экскаваторы, манипуляторы и роботы, одним словом, машины, совершающие быстрые повороты, качательные и возвратно-поступательные движения. В этом рекуператоре было два маховика (один довольно точно имитировал движение рабочего органа робота или манипулятора, стре 28 |








