Техника - молодёжи 1984-06, страница 45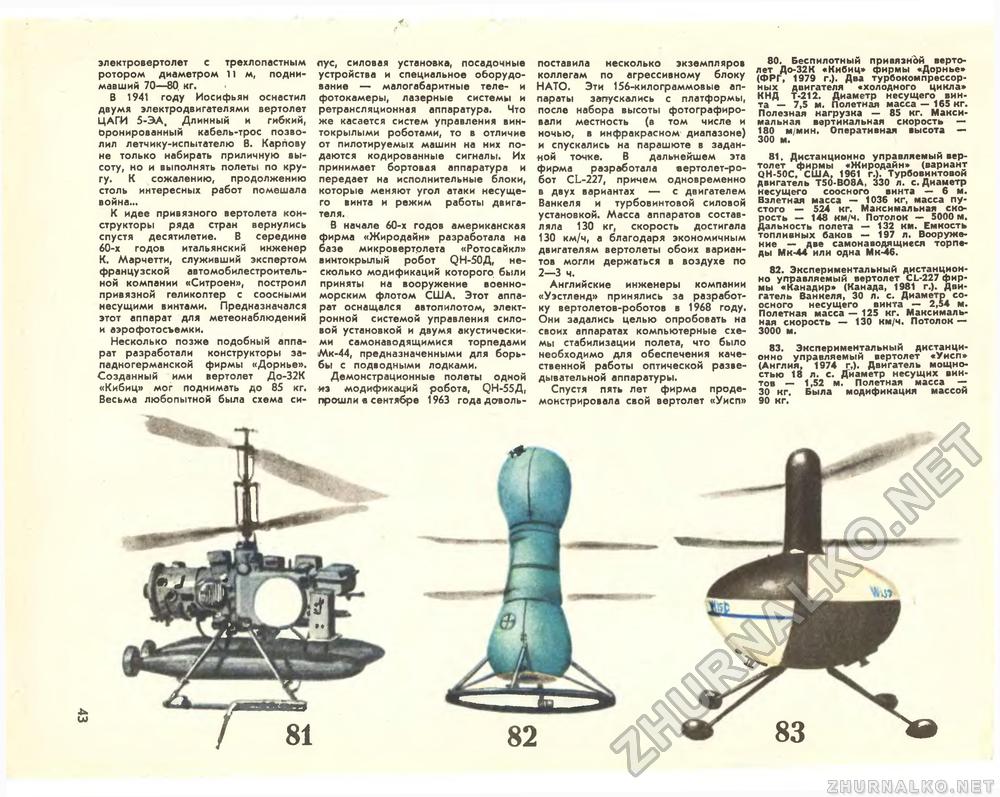
электровертолет с трехлопастным ротором диаметром 11 м, поднимавший 70—80 кг. В 1941 году Иосифьян оснастил двумя электродвигателями вертолет ЦАГИ 5-ЭА, Длинный и гибкий, оронированный кабель-трос позволил летчику-испытателю В. Карпову не только набирать приличную высоту, но и выполнять полеты по кругу. К сожалению, продолжению столь интересных работ помешала война... К идее привязного вертолета конструкторы ряда стран вернулись спустя десятилетие. В середине 60-х годов итальянский инженер К. Марчетти, служивший экспертом французской автомобилестроительной компании «Ситроен», построил привязной геликоптер с соосными несущими винтами. Предназначался этот аппарат для метеонаблюдений и аэрофотосъемки. Несколько позже подобный аппарат разработали конструкторы западногерманской фирмы «Дорнье». Созданный ими вертолет До-32К «Кибиц» мог поднимать до 85 кг. Весьма любопытной была схема си- пус, силовая установка, посадочные устройства и специальное оборудование — малогабаритные теле- и фотокамеры, лазерные системы и ретрансляционная аппаратура. Что же касается систем управления винтокрылыми роботами, то в отличие от пилотируемых машин на них подаются кодированные сигналы. Их принимает бортовая аппаратура и передает на исполнительные блоки, которые меняют угол атаки несущего винта и режим работы двигателя. В начале 60-х годов американская фирма «Жиродайн» разработала на базе микровертолета «Ротосайкл» винтокрылый робот QH-50A, несколько модификаций которого были приняты на вооружение военно-морским флотом США, Этот аппарат оснащался автопилотом, электронной системой управления силовой установкой и двумя акустическими самонаводящимися торпедами Мк-44, предназначенными для борьбы с подводными лодками. Демонстрационные полеты одной •из модификаций робота, QH-55A, прошли а сентябре 1963 годадоволь- поставила несколько экземпляров коллегам по агрессивному блоку НАТО. Эти 156-килограммовые аппараты запускались с платформы, после набора высоты фотографировали местность (в том числе и ночью, в инфракрасном диапазоне) и спускались на парашюте в заданной точке. В дальнейшем эта фирма разработала вертолет-робот CL-227, причем одновременно в двух вариантах — с двигателем Ванкеля и турбовинтовой силовой установкой. Масса аппаратов составляла 130 кг, скорость достигала 130 км/ч, а благодаря экономичным двигателям вертолеты обоих вариантов могли держаться в воздухе по 2—3 ч. Английские инженеры компании «Уэстленд» принялись за разработку вертолетов-роботов в 1968 году. Они задались целью опробовать на своих аппаратах компьютерные схемы стабилизации полета, что было необходимо для обеспечения качественной работы оптической разведывательной аппаратуры. Спустя пять лет фирма продемонстрировала свой вертолет «Уисп» 80. Беспилотный привяэн&й вертолет До-32К «Кибиц» фирмы «Дорнье» (ФРГ, 1979 г.). Два турбокомпрессор-ных двигателя «холодного цикла» КНД Т-212. Диаметр несущего винта — 7,5 м. Полетная масса — 165 кг. Полезная нагрузка — 85 кг. Максимальная вертикальная скорость — 180 м/мин. Оперативная высота — 300 м. 81. Дистанционно управляемый вертолет фирмы «Жиродайн» (вариант QH-50C, США, 1961 г.). Турбовинтовой двигатель Т50-В08А, 330 л. с. Диаметр несущего соосного винта — 6 м. Взлетная масса — 1036 кг, масса пустого — 524 кг. Максимальная скорость — 148 км/ч. Потолок — 5000 м. Дальность полета — 132 км. Емкость топливных баков — 197 л. Вооружение — две самонаводящиеся торпеды Мк-44 или одна Мк-46. 82. Экспериментальный дистанционно управляемый вертолет CL-227 фирмы «Канадир» (Канада, 1981 г.). Двигатель Ванкеля, 30 л. с. Диаметр соосного несущего винта — 2,54 м. Полетная масса — 125 кг. Максимальная скорость — 130 км/ч. Потолок — 3000 м. 83. Экспериментальный дистанционно управляемый вертолет «Уисп» (Англия, 1974 г,). Двигатель мощностью 18 л. с. Диаметр несущих винтов — 1,52 м. Полетная масса — 30 кг. Была модификация массой 90 кг. |








